
Bentornati su Marte! Oggi abbiamo parecchia carne al fuoco con aggiornamenti da terra, dall’aria e dallo spazio. Iniziamo con questi ultimi.
Non solo MRO
In questa rubrica vediamo spesso immagini e resoconti del Mars Reconnaissance Orbiter della NASA, ma ci sono numerosi altri satelliti artificiali attorno a Marte.
Per esempio quello degli Emirati Arabi Uniti che con la sonda Hope (traduzione in inglese dall’arabo Misbar Al-Ama) sono entrati in orbita attorno al pianeta rosso per la prima volta nel febbraio 2021.
Dal momento della stabilizzazione dell’orbita per gli scopi di missione Hope ha percorso una traiettoria che la vedeva muoversi tra 44.000 e 22.000 km dalla superficie del pianeta. A febbraio è stato annunciato che la sonda avrebbe eseguito un’accensione dei suoi propulsori per raggiungere una nuova orbita di 43.000 x 20.000 km con inclinazione di 25° (tramite una manovra nota come ‘trasferimento orbitale alla Lambert’).

Da questa nuova orbita Hope, il 10 marzo, ha avuto l’occasione di eseguire un primo sorvolo estremamente ravvicinato di Deimos, la luna minore di Marte, e riprenderla da un punto di vista inedito a circa 100 km di distanza.

È stata rilasciata anche la breve sequenza video con l’intero sorvolo della sonda alla piccola luna irregolare (appena 12.4 km di lunghezza).
La particolarità di questa osservazione è legata alla traiettoria molto alta della sonda che consente di osservare il lato “lontano” di Deimos nonostante l’orbita di quest’ultimo abbia un raggio di circa 23.500 km. Il satellite, come la nostra Luna, è bloccato marealmente rispetto al suo pianeta, al quale rivolge sempre lo stesso lato.
Dal punto di vista scientifico Hope ha già prodotto dei risultati interessanti grazie alle osservazioni eseguite con i suoi tre strumenti che hanno eseguito rilevazioni ottiche che spaziano dall’infrarosso all’ultravioletto estremo.
Le caratteristiche spettrali di Deimos, relativamente piatte e prive dei picchi tipici dei meteoriti ricchi di carbonio, sembrano indicare che il satellite si sia formato dagli stessi materiali di cui è composto Marte. Apparentemente escludendo quindi la teoria per cui Deimos sia un asteroide catturato dalla gravità marziana.
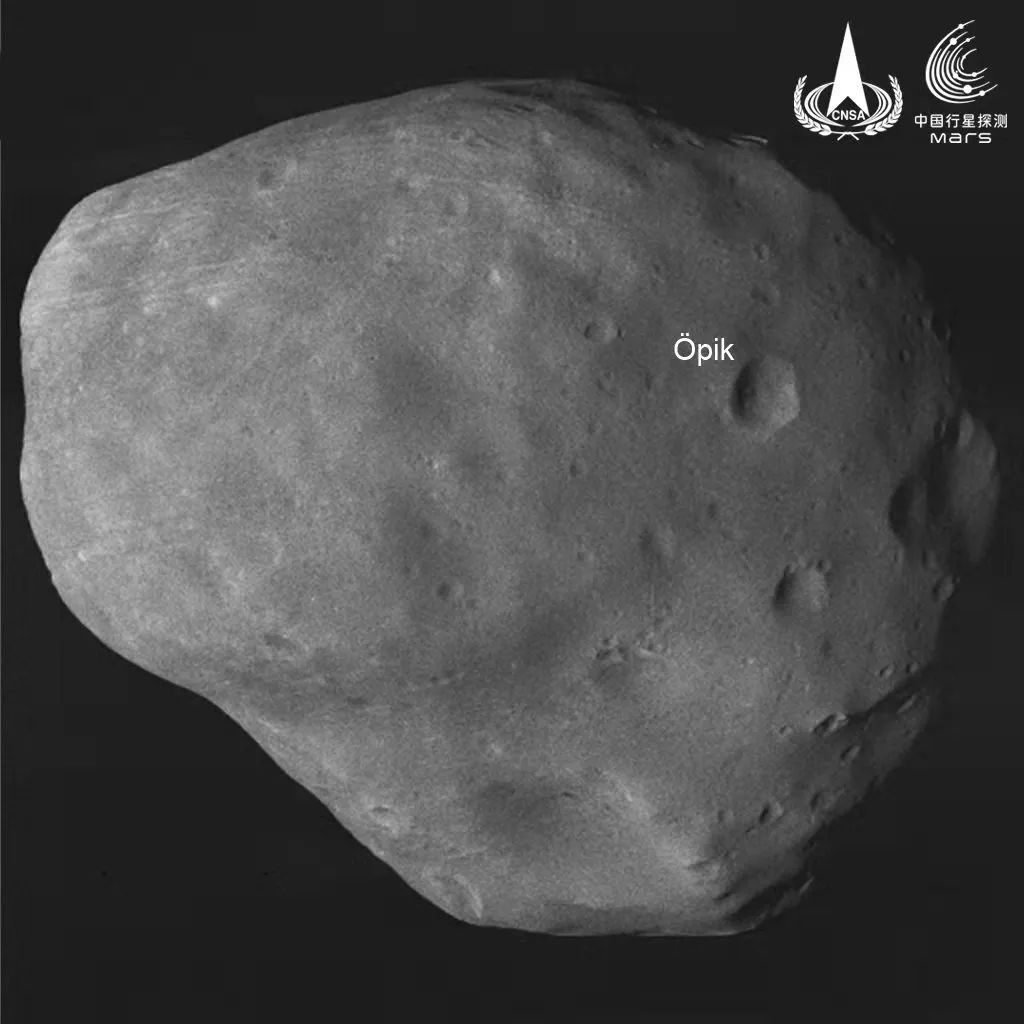
Sempre a proposito di satelliti, risale a luglio dell’anno scorso l’incontro ravvicinato con l’altra luna di Marte stavolta però da parte di Tianwen 1, l’orbiter cinese che sta svolgendo osservazioni del pianeta e ha supportato del comunicazioni del rover Zhurong.
Phobos è stata osservata dalla distanza di 5.100 km con la camera ad alta risoluzione HiRIC montata su un apparato ottico con focale di 4640 mm.
Questa non è stata l’unica immagine molto suggestiva prodotta dalla missione cinese, che a inizio 2022 aveva stupito con la diffusione di un autoscatto decisamente particolare.
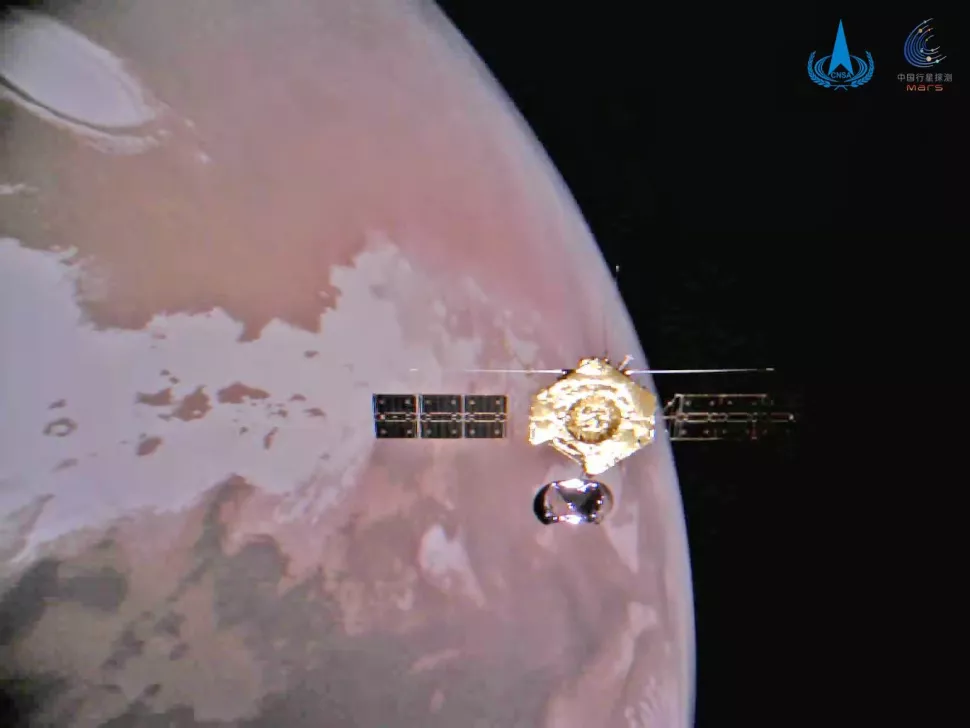
Grazie al rilascio di una piccola camera, che comunicava con la sonda madre tramite wifi, abbiamo questa incredibile immagine di Tianwen 1 che sorvola il polo nord di Marte. In evidenza i pannelli solari, la grande antenna per le comunicazioni verso la Terra e le più piccole antenne per rilevazioni scientifiche.
Un nuovo software per Curiosity
La prima settimana di aprile ha visto il caricamento a lungo atteso di un grande aggiornamento per il computer del rover: nel corso di 5 Sol sono state applicate ben 180 patch.
Tra i tanti miglioramenti minori c’è una semplificazione dei messaggi di risposta generati da Curiosity, nonché una revisione di grandi porzioni di codice che avevano visto l’accumularsi di tante vecchie correzioni derivate dai primi update risalenti addirittura al 2012. Ci sono in particolare due aggiornamenti corposi e interessanti che allungheranno la vita operativa del rover.
Il primo di essi potenzia le abilità di Curiosity di fare più cose contemporaneamente. A differenza del suo giovane cugino Perseverance, che dispone di un computer dedicato per gestire la navigazione automatica, Curiosity è limitato in questa attività dalla sua scarsa potenza di calcolo. Non potendo analizzare rapidamente il terreno circostante fotografato dalle camere di navigazione, era costretto ad avanzare molto lentamente. Gli spostamenti automatici erano intervallati da pause di interi minuti nel corso delle quali il suo cervello elettronico processava le immagini per decidere il successivo, breve, avanzamento da compiere. Una parte del recente aggiornamento ottimizza enormemente il modo in cui Curiosity potrà processare le immagini impiegate durante la navigazione, facendo sì che le pause per l’elaborazione durino solo pochi secondi. Questo si tradurrà in spostamenti più rapidi, un minore consumo energetico e, sul lungo periodo, una vita più lunga per il rover. La potenza prodotta dal generatore di Curiosity sta calando in modo lento ma inesorabile, perciò tecnici e ingegneri sono sempre alla ricerca di modi nuovi per sfruttare al meglio l’energia a disposizione.
Il secondo importante aggiornamento aiuterà Curiosity a preservare le sue ruote. Grazie a due nuovi comandi a disposizione dei piloti del rover si potranno ottimizzare i percorsi che richiedono a Curiosity di sterzare nel suo percorso, riducendo l’azione di curvatura delle ruote e la conseguente usura a loro carico.
È dal 2013 che osserviamo le rocce marziane assestare i loro colpi alle ruote di Curiosity. I progettisti non si attendevano terreni così estremi come quelli che il rover si è effettivamente trovato a dover attraversare, con il tenero alluminio che sta soffrendo le rocce più appuntite.

Le primissime contromisure sono state le più semplici: cercare di evitare, finché possibile, i passaggi più pericolosi. In aggiunta a questa strategia è stato inserito un controllo di routine delle ruote ogni circa 500 metri per tenere sotto controllo i danni.
Da giugno 2017 il rover poteva contare su un nuovo algoritmo descrivibile come un “controllo di trazione”. Quando il robot si sposta su un terreno pianeggiante le sei ruote girano tutte alla stessa velocità, ma quando una di esse incontra un ostacolo le altre due dello stesso lato rischiano di iniziare a scivolare. Questa perdita di trazione diventa problematica nel passaggio su rocce appuntite o incassate. Quando ciò accade, le ruote anteriori tirano quella bloccata verso le rocce e le posteriori la spingono contro. In questi casi la ruota che si trova sull’ostacolo sperimenta forze maggiori che rischiano di portare a crepe o vere e proprie forature. L’algoritmo di controllo della trazione utilizza dati in tempo reale dai sensori per regolare la velocità di ogni ruota riducendo la pressione dalle rocce. Il software misura le modifiche al sistema di sospensione per capire i punti di contatto di ciascuna ruota, calcolando la velocità corretta per evitare lo slittamento.
Gli ottimi risultati ottenuti da questo aggiornamento avevano portato al diradamento delle sessioni di verifica delle ruote, che vengono attualmente eseguite a intervalli di un chilometro.
Ingenuity fa 50 (e 51)
A oltre due anni dal giorno in cui ha toccato il suolo di Marte, Ingenuity vola ancora e ha messo a segno due nuove attività.
La prima di esse, eseguita il 13 aprile, è stata un volo particolarmente significativo: il numero 50! Peraltro non è stata un’attività affatto banale in quanto l’elicottero ha frantumato un altro dei suoi innumerevoli record. Stavolta si è sollevato dal suolo per ben 18 metri, due in più di quelli toccati nel precedente spostamento.
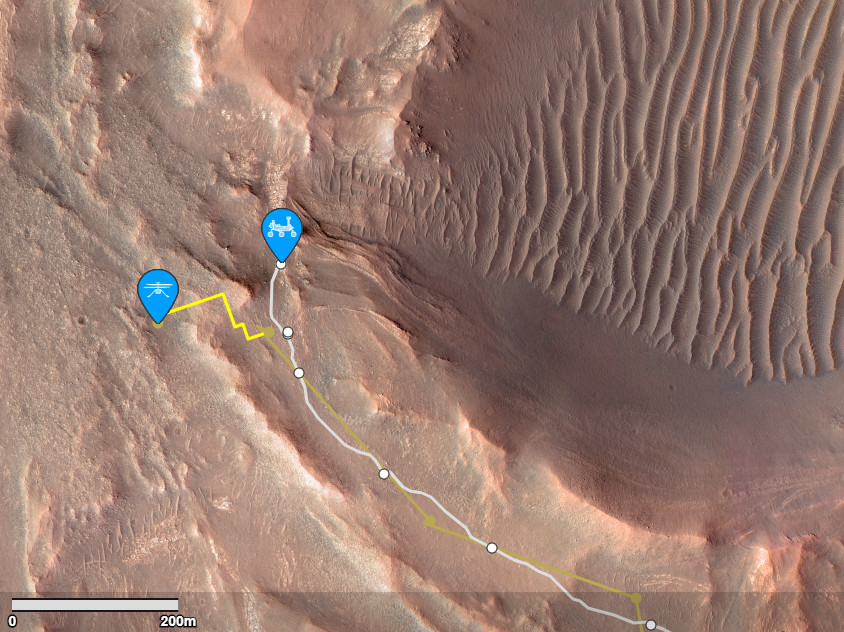
Nei Sol del 50esimo volo i due robot si stavano spostando sul bordo del cratere Belva (visibile nell’immagine satellitare) diretti indicativamente verso nord-ovest.

Come detto, non sono molte le immagini dei voli scaricate e disponibili. In particolare, per il 50esimo, solo 17 frame sono stati al momento recuperati. Li ho allineati nel video che segue con il quale riusciamo a osservare circa 90 secondi dei 146 complessivi del volo. Il tutto è mostrato a una velocità 5 volte quella reale.
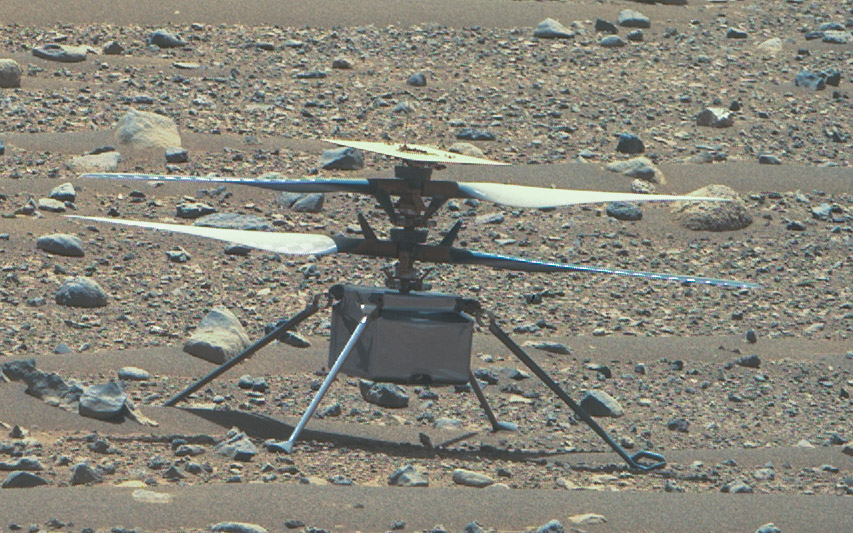
Nei tre Sol successivi Perseverance si è spostato complessivamente di 450 metri facendosi vicinissimo al suo collega esploratore.
Così il 16 aprile, da appena 23 metri di distanza, ci ha potuto regalare questa splendida immagine di Ingenuity.
Un ottimo modo per salutare e ringraziare Ingenuity che, il 19 aprile, ha festeggiato il suo secondo compleanno (terrestre…) di lavoro su Marte: in quel giorno del 2021 si sollevava per la prima volta nell’atmosfera del pianeta rosso. In quei 39.1 secondi l’umanità rendeva possibile il volo controllato su un altro pianeta, un momento storico tanto quanto il primo volo dei fratelli Wright il 17 dicembre 1903. Infatti, non casualmente, un frammento del tessuto che costituiva le ali del Wright Flyer è stato portato su Marte e si trova attualmente sotto il pannello solare dell’elicotterino.
Arriviamo così al 22 aprile, Sol 772, data del 51esimo e al momento ultimo volo confermato di Ingenuity.
In 137 secondi l’elicotterino si è spostato verso ovest di 188 metri, con un percorso a zig-zag che è probabilmente servito a eseguire alcune ricognizioni fotografiche. L’ipotesi è d’obbligo perché ancora meno immagini sono disponibili di questo volo. 10 fotogrammi ci consentono di ricostruire la sequenza di atterraggio, qui mostrata in tempo reale.
Una sola foto a colori è stata sinora resa disponibile, ma è senza dubbio una delle più belle mai scattate da Ingenuity. Pur elaborata in modo intenso per esaltarne i dettagli, ve la propongo a risoluzione originale (clic sull’immagine per il formato pieno).
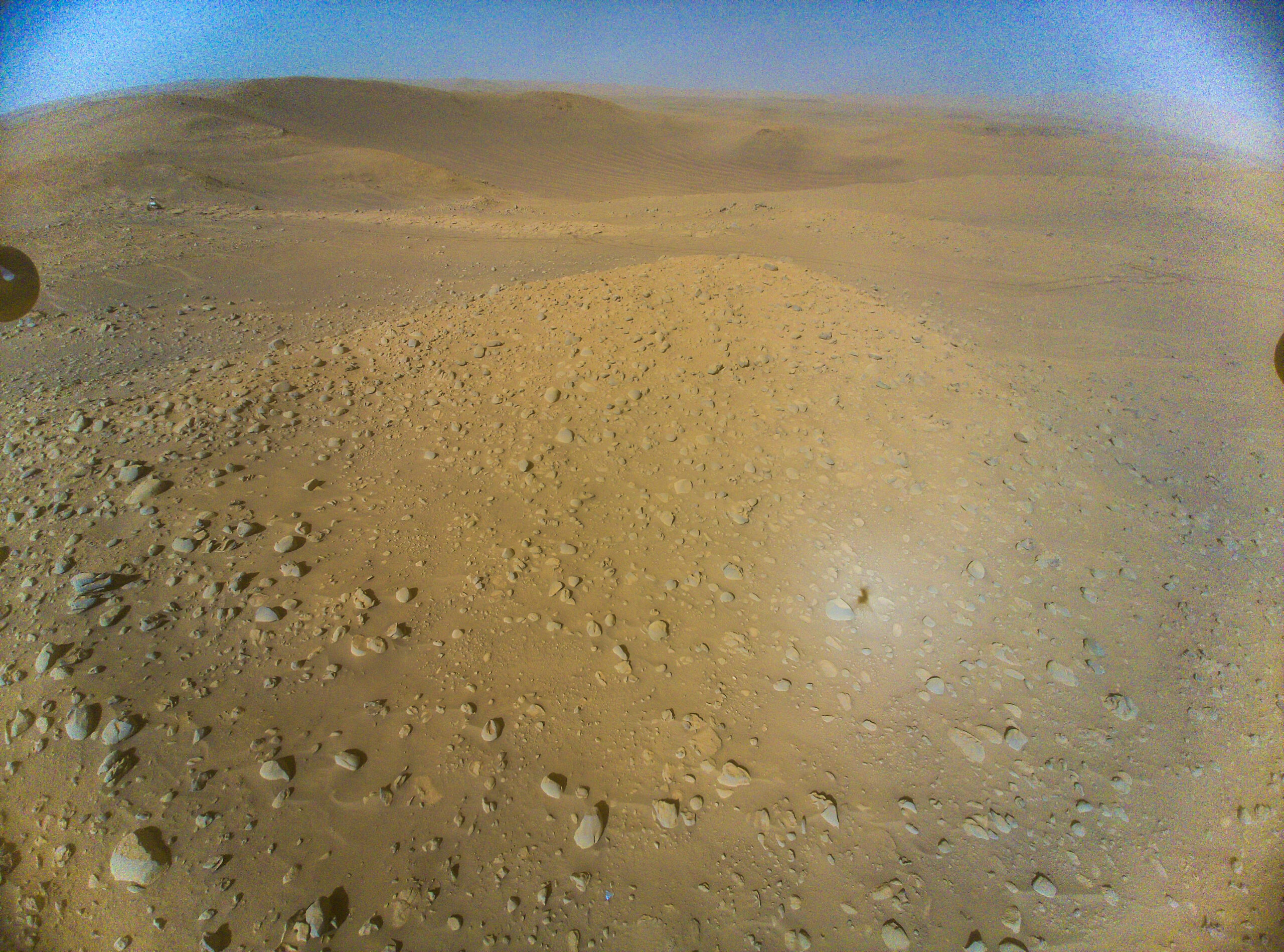
Evidentissima, poco scostata dal centro dell’immagine, l’ombra proiettata dall’elicottero stesso. Risulta circondata da un alone luminoso, conseguenza del fenomeno ottico descritto con vari nomi tra cui opposition surge o effetto Seeliger. Vi rimando alle relative pagine Wikipedia per una migliore comprensione di questo affascinante gioco di luce.
In alto a sinistra una gradita sorpresa: Perseverance! È solo la seconda volta che Ingenuity riesce a fotografare il rover, la prima era stata in occasione del terzo volo il 27 aprile 2021. Si riescono anche a scorgere le tracce scure lasciate dalle sue ruote durante gli spostamenti dei precedenti Sol.
In basso al centro un frammento dello stadio EDL con cui rover ed elicottero sono atterrati su Marte oltre due anni fa. Molti detriti simili sono stati sparpagliati dal vento nella pianura del cratere Jezero, è la prima volta che uno di essi viene documentato così lontano dalla zona di atterraggio e a quota così elevata.

In ultimo, ma non per importanza, un particolare così grande che potrebbe sfuggire all’osservazione: il grande cratere Belva che copre buona parte della porzione superiore dell’immagine con i suoi 900 metri di diametro.
Immagini e attività di Perseverance
Chiudiamo questo aggiornamento da Marte con il rover di Mars 2020. In queste settimane Perseverance sta esplorando e documentando per noi il versante occidentale del cratere più volte menzionato. Con una colossale sequenza di foto scattate dalle MastCam-Z possiamo immergerci quasi a 180° nei panorami di questa regione. Provo a mostrarveli con un mosaico da 225 Megapixel costituito da 226 singoli scatti (clic per la versione parzialmente ridotta ma comunque ad altissima risoluzione).

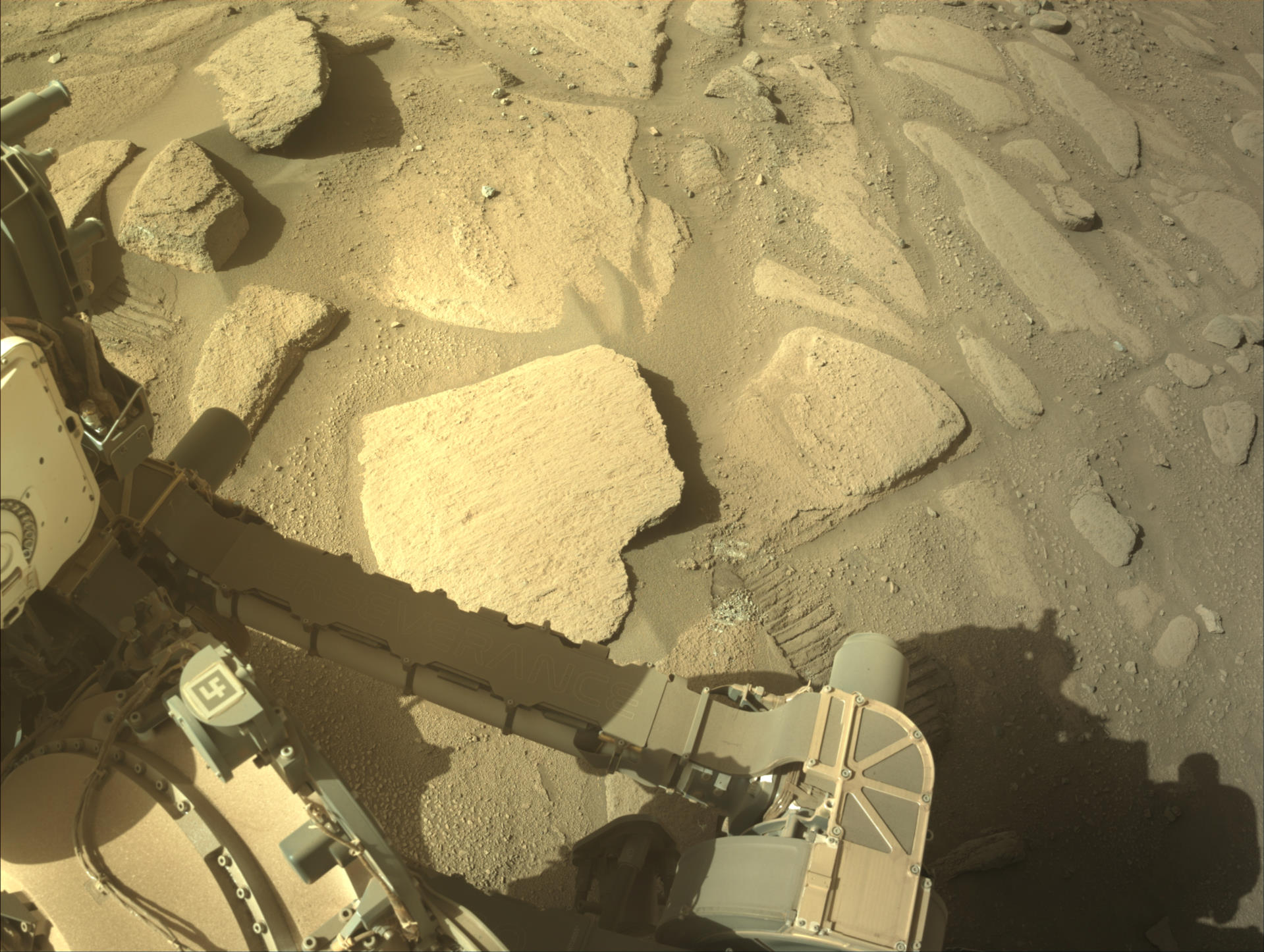
Le ultime foto che abbiamo ricevuto da Perseverance sono del Sol 777, 28 aprile, e riguardano un’attività di abrasione su una roccia non lontana dal punto da cui ha scattato il panorama (per la precisione 114 metri più a nord).
Non è detto che a questa attività faccia seguito un prelievo, perché come abbiamo visto le fiale a disposizione sono limitate. I target scientifici dovranno quindi essere selezionati con grande rigore per disporre di una varietà quanto più possibile eterogenea di campioni.
Vediamo con due immagini e un breve video come si sia svolta questa attività nell’arco di due Sol. L’operazione di abrasione è durata 20 minuti, nel video è documentata a velocità 100x grazie alla sequenza di foto della Front HazCam Left A.

Anche per oggi è tutto da Marte, alla prossima!








