
Bentornati su Marte!
Oggi diamo i numeri: 10, 62 e 41. Si parte!
Sample Depot completato!

Dopo 37 Sol di lavori, iniziati il 21 dicembre terrestre, Perseverance ha portato a termine la deposizione delle dieci fiale bianche di titanio che si trovano ora sulla piana della regione Three Forks.
Concludiamo quindi i nostri mosaici con l’aggiunta delle ultime due panoramiche scattate dalla camera Watson nei minuti successivi al rilascio dei contenitori nei Sol 682 e 690 (20 e 28 gennaio).
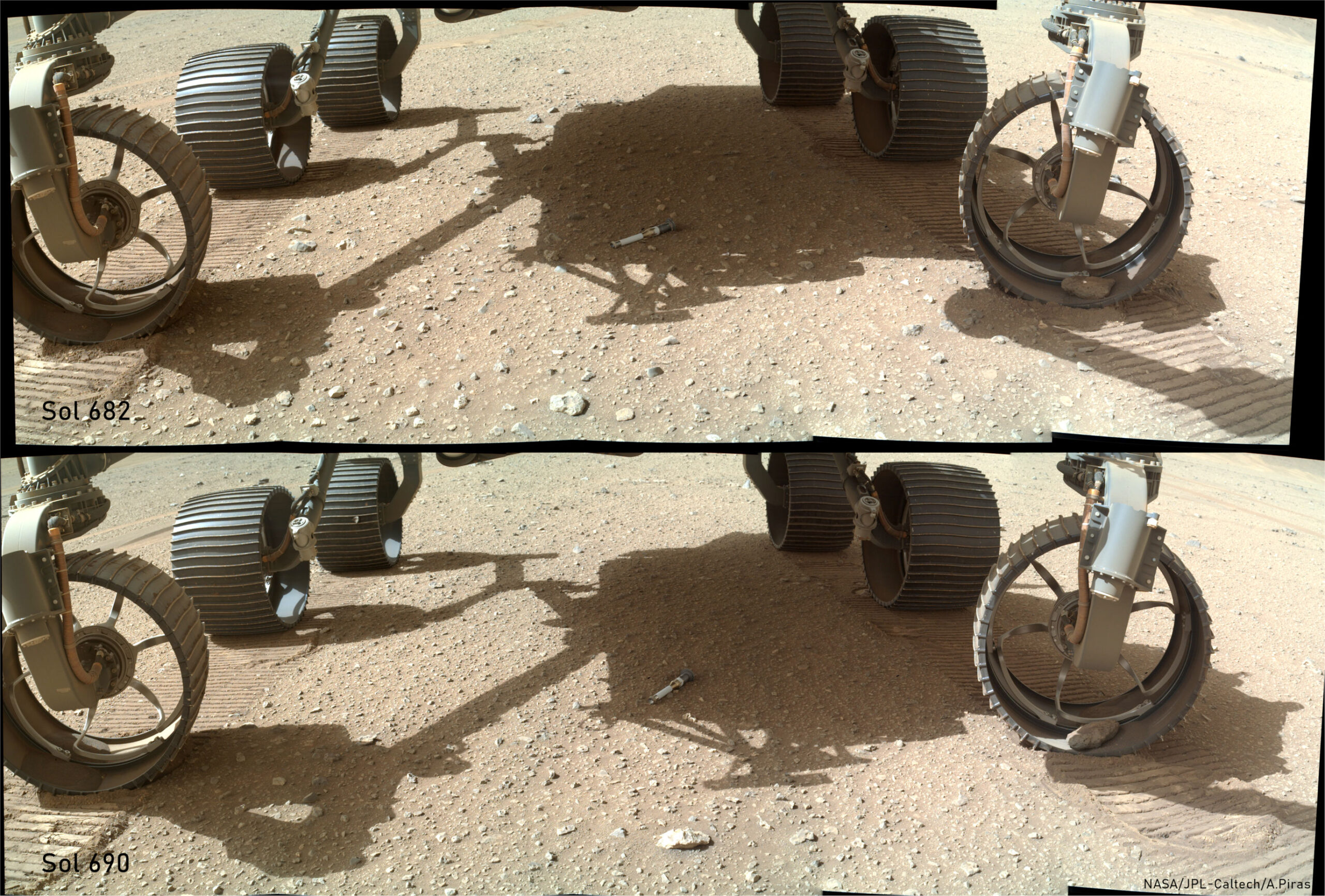
In queste foto ci troviamo davanti al campione Atsà, sigillato il 13 marzo 2022, e al tubo testimone chiamato Amalik chiuso il 14 ottobre sempre dello scorso anno. Questa particolare categoria di fiale, chiamata in inglese witness tube, è stata precaricata in laboratorio con materiali in grado di assorbire sostanze che lo stesso rover potrebbe potenzialmente rilasciare quali gas, residui chimici, materiali organici e inorganici.
I tubi testimone sono di volta in volta aperti da Perseverance e subiscono le stesse manipolazioni delle fiale standard, transiti nel trapano compresi, prima di essere nuovamente sigillati.
L’utilità è permettere agli scienziati di caratterizzare con precisione l’ambiente nel quale i campioni sono stati raccolti, e determinare l’origine terrestre di eventuali contaminanti. Il witness tube Amalik è l’unico a essere stato rilasciato nel corso di queste settimane, mentre gli altri due preparati dal rover tra il 2021 e il 2022 resteranno nella sua “pancia”.
La conclusione di questo mese e mezzo di operazioni permetterà ora a Perseverance di riprendere la via del Delta attraverso il passaggio chiamato Hawksbill Gap, già esplorato alcuni mesi fa. La chiusura della campagna Delta Front permetterà l’inizio della Delta Top, che dovrebbe tenere Perseverance impegnato per otto mesi.
Gli scienziati sono pronti a osservare dei profondi cambiamenti nel terreno che il rover esplorerà e in particolare nell’aspetto delle rocce, che daranno indizi chiave ai geologi per la comprensione della loro origine.
Nella parte bassa e iniziale del delta, sino alle pendici già esplorate del rilievo Rocky Top, ci siamo trovati in presenza di materiali che sembrano essersi formati in un ambiente lacustre.
Man mano che Perseverance continuerà a risalire il Delta e allontanarsi da questa regione le rocce che incontrerà avranno caratteristiche compatibili con quelle di materiale fluviale, eroso dall’acqua e qui trasportato per lunghe distanze da un antichissimo fiume.
Una delle prime tappe per il rover sarà un banco di sabbia visibile dalle immagini satellitari chiamato Curvilinear Unit. Gli scienziati presumono che si tratti di un deposito di sedimenti localizzato in quella che fu un’ansa del fiume, possibile sito con presenza di arenaria e argillite. Un’area eccellente per iniziare a scoprire di più sui processi geologici che sono occorsi poco fuori dal Cratere Jezero.
Vi ricordo che potete seguire gli spostamenti del rover, passati e futuri, nella pagina messa a disposizione dalla NASA e aggiornata quotidianamente:
https://mars.nasa.gov/mars2020/mission/where-is-the-rover/
3…2…1…cheese!
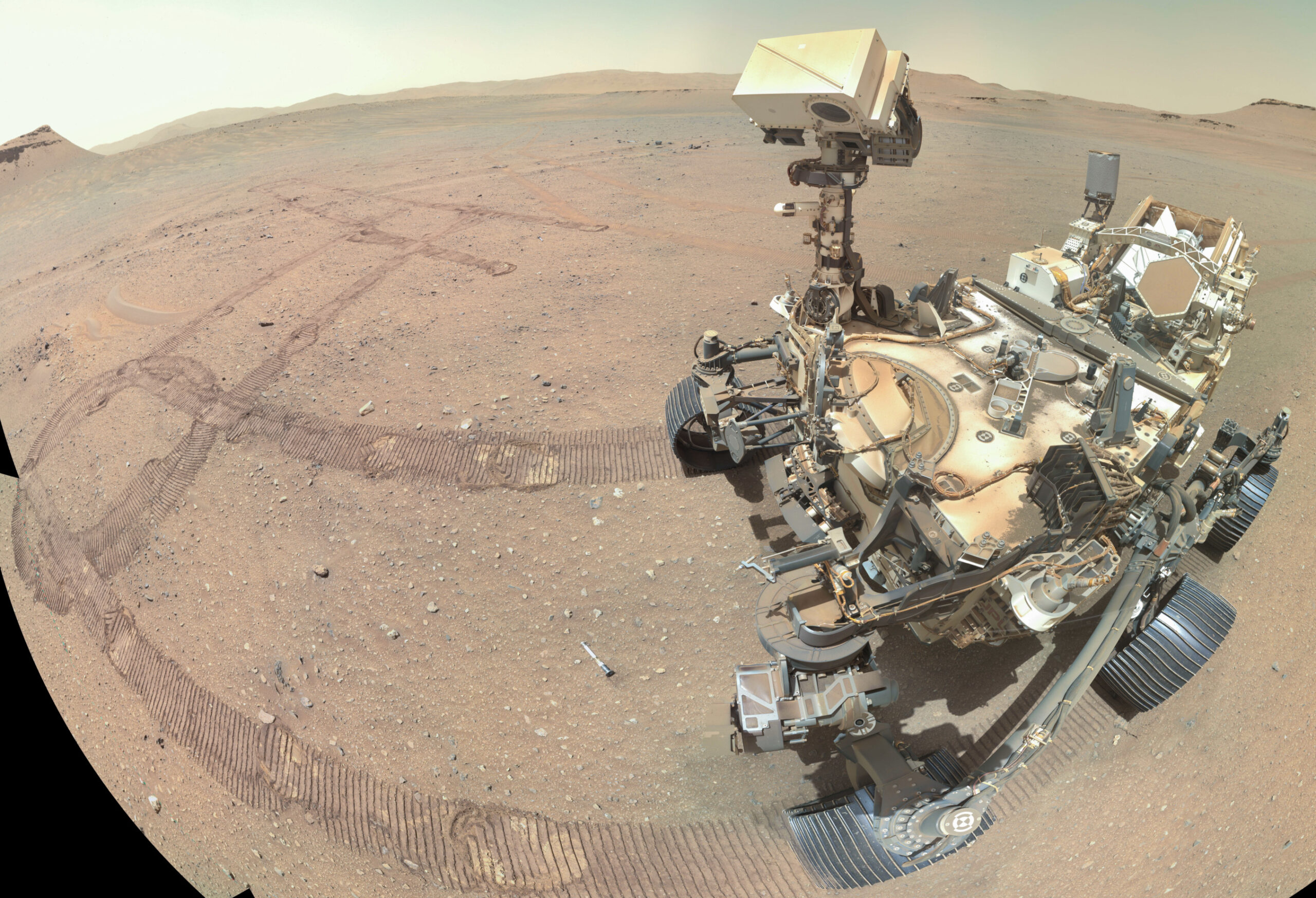
Qualche giorno prima del rilascio dell’ultima fiala i tecnici del JPL hanno istruito il rover per eseguire una serie di scatti, ancora una volta con la versatile camera montata sul braccio robotico. Il risultato di 62 foto acquisite nell’arco di 46 minuti è ammirabile nell’immagine sottostante.
Ho realizzato anche una versione panoramica a 360° che può essere navigata ed esplorata a piacimento (il massimo livello di dettaglio si ottiene, purtroppo, solo osservandola tramite la app di Facebook).
<iframe src=”https://www.facebook.com/plugins/post.php?href=https%3A%2F%2Fwww.facebook.com%2Fsardastro%2Fposts%2Fpfbid02eu49ptia8KjrQQVT3WxQevvVsezcrRuuMVAPy12Z9cMz8fgvbwax3EhssfSxmjFal&width=750&show_text=false&appId=91423507180&height=412″ width=”750″ height=”412″ style=”border:none;overflow:hidden” scrolling=”no” frameborder=”0″ allowfullscreen=”true” allow=”autoplay; clipboard-write; encrypted-media; picture-in-picture; web-share”></iframe>
Ecco l’anteprima
Dalla sua posizione Perseverance sembra quasi compiaciuto del Sample Depot da lui creato, con tutte le fiale bianche rintracciabili (qualcuna più facilmente di altre) nell’immagine ad alta risoluzione. Se siete perplessi su dove sia orientata la testa del rover la risposta è sì, ci sono due versioni della foto. In una Perseverance guarda in camera e nell’altra guarda al suolo, precisamente sull’orma lasciata dalla sua ruota anteriore sinistra. La differenza sono esattamente tre foto!
Osservando l’immagine in dettaglio potrebbe inoltre sorgere un ragionevole dubbio: dov’è il braccio che ha scattato le foto? Ed ecco che viene fuori l’ingegno dei tecnici della NASA.
Selfie stick e tanta precisione
Sfruttando la mobilità del braccio dotato di cinque gradi di libertà (gli snodi, per intenderci) il rover ha fatto in modo di muovere opportunamente la sua appendice durante la sessione di ripresa così che in nessuna foto l’arto robotico fosse inquadrato.
Complicato? Proviamo a vedere in video come si svolge la movimentazione nel corso di una di questi lunghe sessioni di autoscatto.
L’occasione ci è fornita da una serie di fotografie eseguite nel Sol 46 poco dopo la conclusione della lunga operazione di rilascio dell’elicottero Ingenuity. Era il lontano 6 aprile 2021 e, mentre la camera Watson scattava le sue foto, analoghe acquisizioni erano svolte dalla NavCam di sinistra che riprendeva proprio la torretta in cima al braccio robotico.
Le foto che vedete scorrere sono perfettamente sincronizzate tra loro.
È affascinante osservare la precisione con cui il braccio robotico ruota per riprendere il paesaggio tutto attorno.
Un passaggio importante del video, fondamentale per rispondere finalmente alla domanda, si trova al secondo 40.
Il rover sta riprendendo il suolo e un’area molto critica, vale a dire lo snodo della “spalla”. In questo momento avviene una importante movimentazione dell’intero braccio che cambia la sua orientazione, si sposta sul lato dove le riprese sono appena state effettuate e può proseguire le acquisizioni!
Ripropongo qui di seguito un loop con i secondi di video a cui faccio riferimento.
È grazie a questo trucco che l’unione degli scatti può avvenire riducendo al minimo le interferenze visive del braccio da oltre due metri di lunghezza.
Un’altra finezza tecnica ci è suggerita dal movimento estremamente complesso della torretta che per buona parte del video ruota molto precisamente attorno al centro ottico della camera Watson.
Questo accorgimento, comunissimo nella fotografia panoramica, evita l’errore di parallasse che si introdurrebbe nel momento in cui le foto risultassero scattate da posizioni non coincidenti tra loro anche solo per pochi millimetri.
L’incidenza dell’errore è inversamente proporzionale alla distanza del soggetto fotografato: le montagne non risentirebbero di questa differenza, al contrario dei vicinissimi particolari del rover che soffrirebbero di un indesiderato effetto stereoscopico. La parallasse è sfruttata con successo da altre camere, montate in coppie in modo da sfruttare l’effetto risultante e produrre ricostruzioni tridimensionali dell’ambiente. Il software di navigazione autonoma è così avanzato che sfrutta queste immagini per decidere quale strada percorrere per arrivare in una determinata posizione evitando ostacoli e aree pericolose.
In queste settimane, dalla sua posizione a Three Forks, Perseverance ha prodotto anche altre belle immagini più convenzionali.
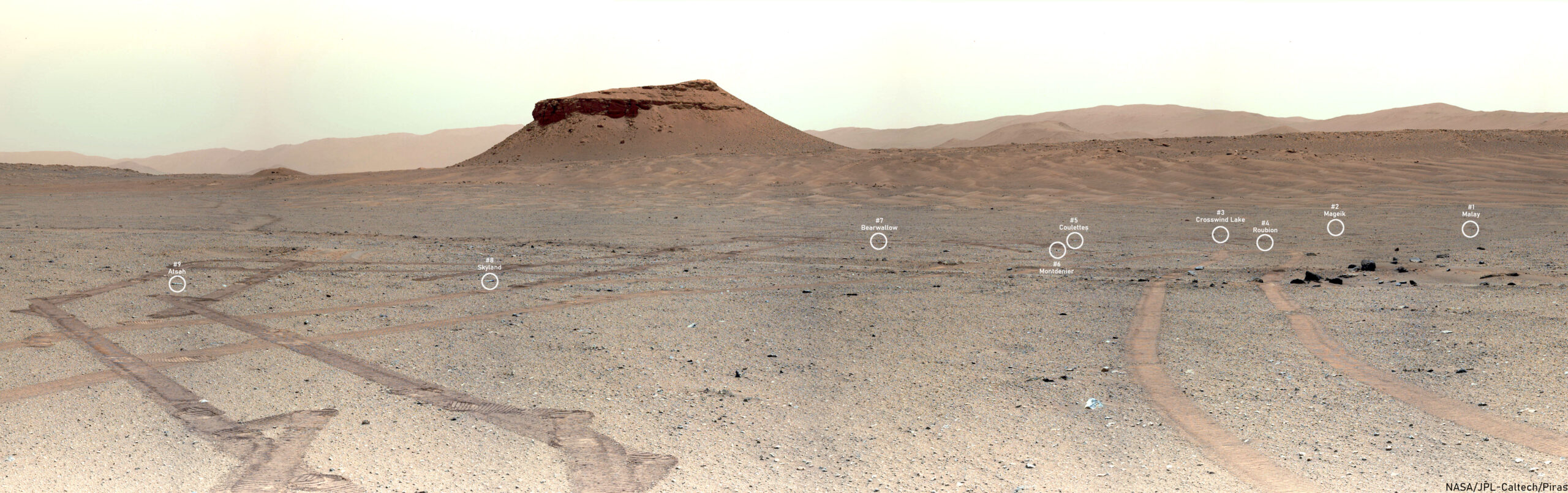
C’è per esempio una bella panoramica recente, scattata qualche tempo prima del rilascio della decima fiala ma con il rover che era già posizionato nella zona prestabilita per l’operazione. Da questo punto di vista rivolto a sud il rover ci mostra tutte le nove fiale che si è lasciato dietro, qui evidenziate con i cerchietti e numerate. Si tratta di una piccola porzione di un mosaico a 360°, realizzato combinando 47 scatti della MastCam-Z di sinistra. Aprendo l’immagine in alta risoluzione e usando le fiale come riferimenti non dovreste faticare troppo a percorrere a ritroso le tracce sulla sabbia.
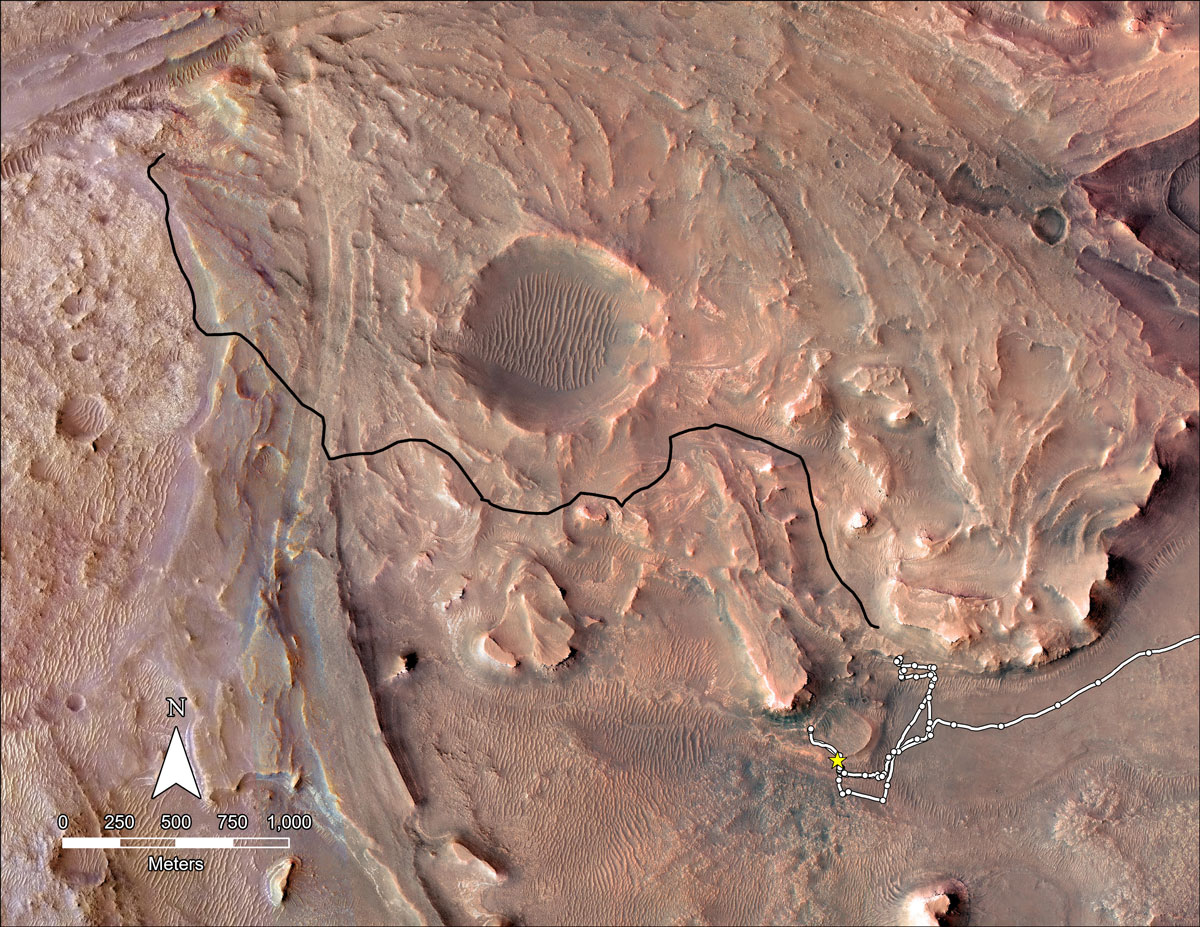
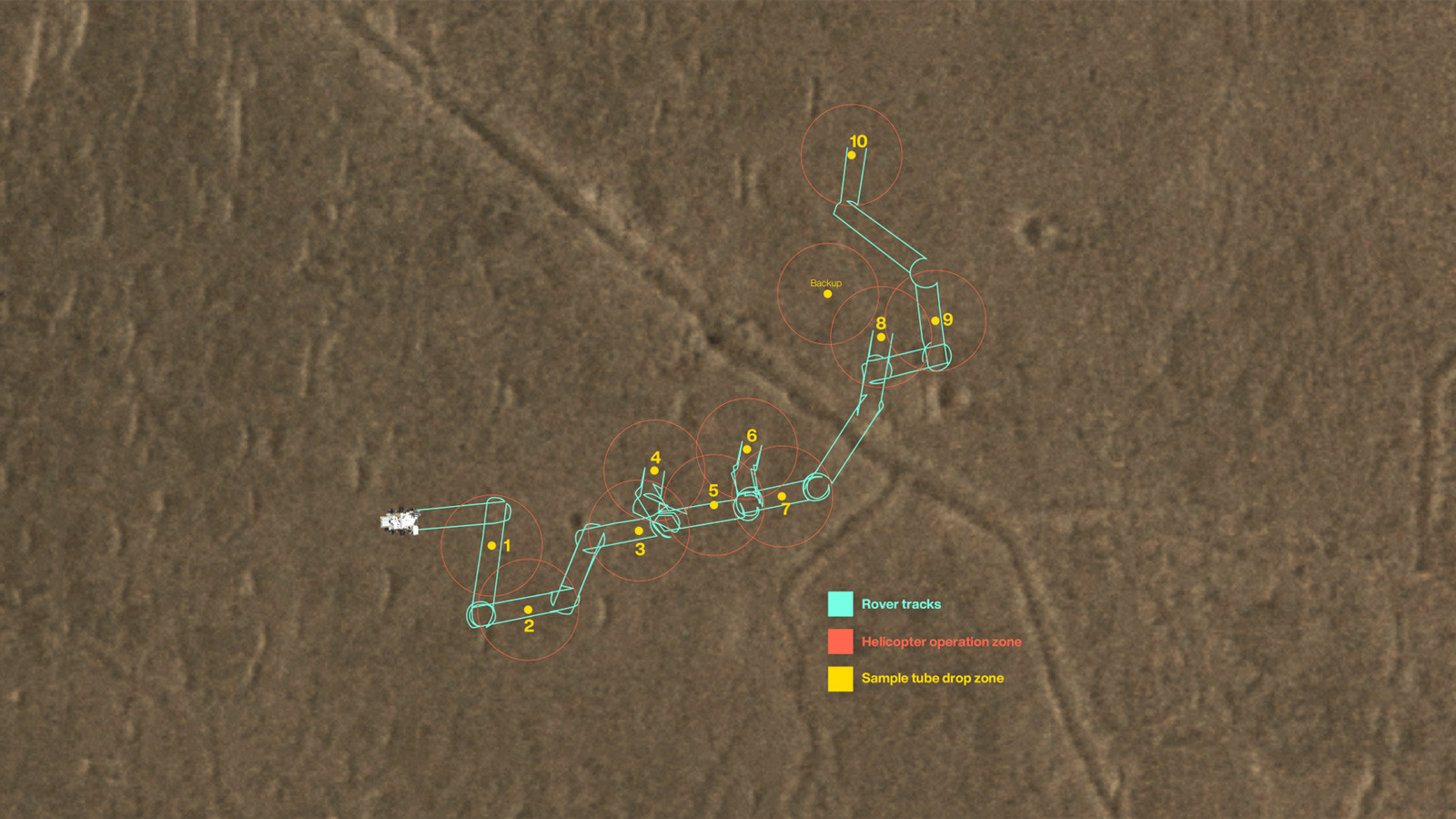
Per non perdere l’orientamento vi rammento il percorso seguito dal rover durante queste settimane sfruttando ancora una volta la bella immagine prodotta dai grafici della NASA che supportano la divulgazione al grande pubblico.
È invece ancora più recente, solo del 31 gennaio, la prima serie di immagini del tubo testimone Malik con il paesaggio marziano di contorno. La visuale sottostante ci è offerta dalla nostra fidata Left NavCam.

Torniamo indietro di qualche settimana rispetto a queste immagini, precisamente all’8 gennaio. In quella giornata Perseverance ha scattato un altro maestoso panorama.
Stavolta navighiamolo in video, e aguzzate la vista!
Ebbene sì, dopo svariati mesi di lontananza Perseverance è tornato a vedere il suo collega Ingenuity! Al momento dello scatto i due risultavano distanti appena 270 metri grazie agli ultimi spostamenti dell’elicottero che si è portato verso ovest per riavvicinarsi al rover. Si riaprono così le azioni di supporto sotto forma di ricognizioni aeree nell’area variegata e accidentata che aspetta i due esploratori robotici.
E intanto dov’è arrivato Ingenuity?
Avevamo lasciato l’elicottero a fine dicembre con il 38esimo volo ancora da compiere, in ritardo rispetto allo svolgimento previsto per il 24 dicembre.
Il volo si è svolto il 4 gennaio con uno spostamento di 111 metri compiuti in 74 secondi. È da questo sito di atterraggio, Airfield Z, che Ingenuity è stato fotografato da Perseverance.
Abbiamo dovuto aspettare l’11 gennaio per vedere il volo successivo, che non ha prodotto uno spostamento netto. Si è trattato infatti di un ulteriore test delle funzionalità legate all’aggiornamento del software di volo, e per questo scopo Ingenuity si è spostato avanti e indietro per complessivi 140 metri atterrando nello stesso punto del decollo (con uno scarto di appena due metri). In quest’area il suolo è molto sabbioso, quindi abbiamo potuto osservare le quattro piccole orme lasciate dalle gambe di atterraggio. Il computer di bordo ha correttamente scelto un’area priva di ostacoli (rilevati tramite un’analisi del contrasto delle immagini della camera di navigazione) ma sensibilmente inclinata. Il posizionamento sulla duna è visibile chiaramente anche nella panoramica video che vi ho mostrato poco sopra.
Il rischio che al decollo Ingenuity acquisisca quota rimanendo storto, spostandosi così dalla verticale ideale, è scongiurato dall’uso dell’inclinometro che misura l’orientamento dell’elicottero pochi istanti prima del decollo. In questo modo eventuali correzioni di assetto possono essere eseguite repentinamente riportando il velivolo sull’asse ideale.
Il volo numero 40 ha avuto luogo il 19 gennaio, con uno spostamento di 178 metri in 92 secondi. Avendo terminato le lettere dell’alfabeto latino bisogna passare a quello greco, perciò Ingenuity è atterrato a Airfield Beta. Manca l’alfa? In effetti sì, le mie ricerche di un eventuale “Airfield Alpha” sono state inconclusive. È probabile che si sia deciso di saltare la prima lettera greca per non togliere prestigio all’area di volo che ha visto il primo decollo di un aeromobile su un altro pianeta, ufficialmente denominata Wright Brothers Field. La tesi è supportata dal fatto che non esiste neppure un “Airfield A”.
Sono gli imprevisti di nomenclatura che insorgono quando il tuo drone avrebbe dovuto fare 5 voli e invece arriva a 41.
Esatto, abbiamo anche il 41esimo! Quello che attualmente è l’ultimo volo si è svolto il 27 gennaio. In 109 secondi Ingenuity ha coperto la distanza complessiva di 183 metri tra andata e ritorno, atterrando a pochi metri di distanza dall’esatto punto di decollo. Non si è trattato né di un volo di riposizionamento né di uno di test, ma è stato ufficialmente definito un volo esplorativo. L’elicottero ha iniziato ad acquisire informazioni sul terreno del rilievo già menzionato chiamato Rocky Top che Perseverance si appresta a risalire nelle prossime settimane.


A conclusione di questo ricchissimo aggiornamento marziano vi presento una carrellata con i voli di Ingenuity dal 37 al 41. Le immagini della camera di navigazione in bianco e nero e di quella a colori sono perfettamente sincronizzate tra loro, così come lo scorrimento della mappa. Per questioni di fruibilità i video sono velocizzati a 3x, se volete gustarveli in tempo reale potete scalare a 0.35x la velocità di riproduzione.
Non mi resta che augurarvi buona visione e darvi appuntamento alla prossima news!
Nel numero di Coelum 260 il riassunto di tutto ciò che accade su Marte e cura di Antonio Piras!
 Acquista la tua copia di Coelum Astronomia 260
Acquista la tua copia di Coelum Astronomia 260
ora in prevendita! Clicca qui!
Ben 12 pagine in più di Suggerimenti, Approfondimenti e Curiosità
tutto nel fantastico mondo dell’Astronomia!
oppure approfitta della PROMO ABBONATI A TUTTO COELUM
 scade il 28 febbraio 2023
scade il 28 febbraio 2023








