
Bentornati su Marte!
In questa puntata riprendiamo la ricostruzione degli eventi che hanno portato al termine della missione di Ingenuity con nuove immagini e nuovi video. Vediamo anche un problema di Perseverance con il tappo della camera SHERLOC e recenti osservazioni solari eseguite dal rover. Si parte!
Indice dei contenuti
Tre eliche spezzate, una assente
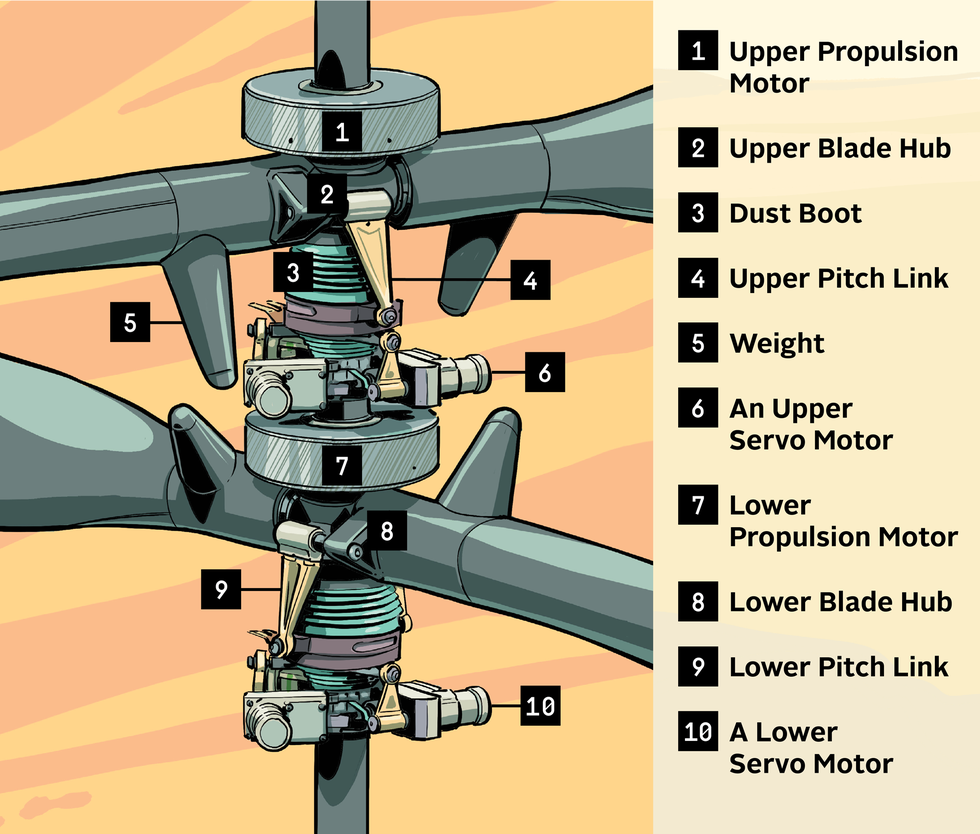
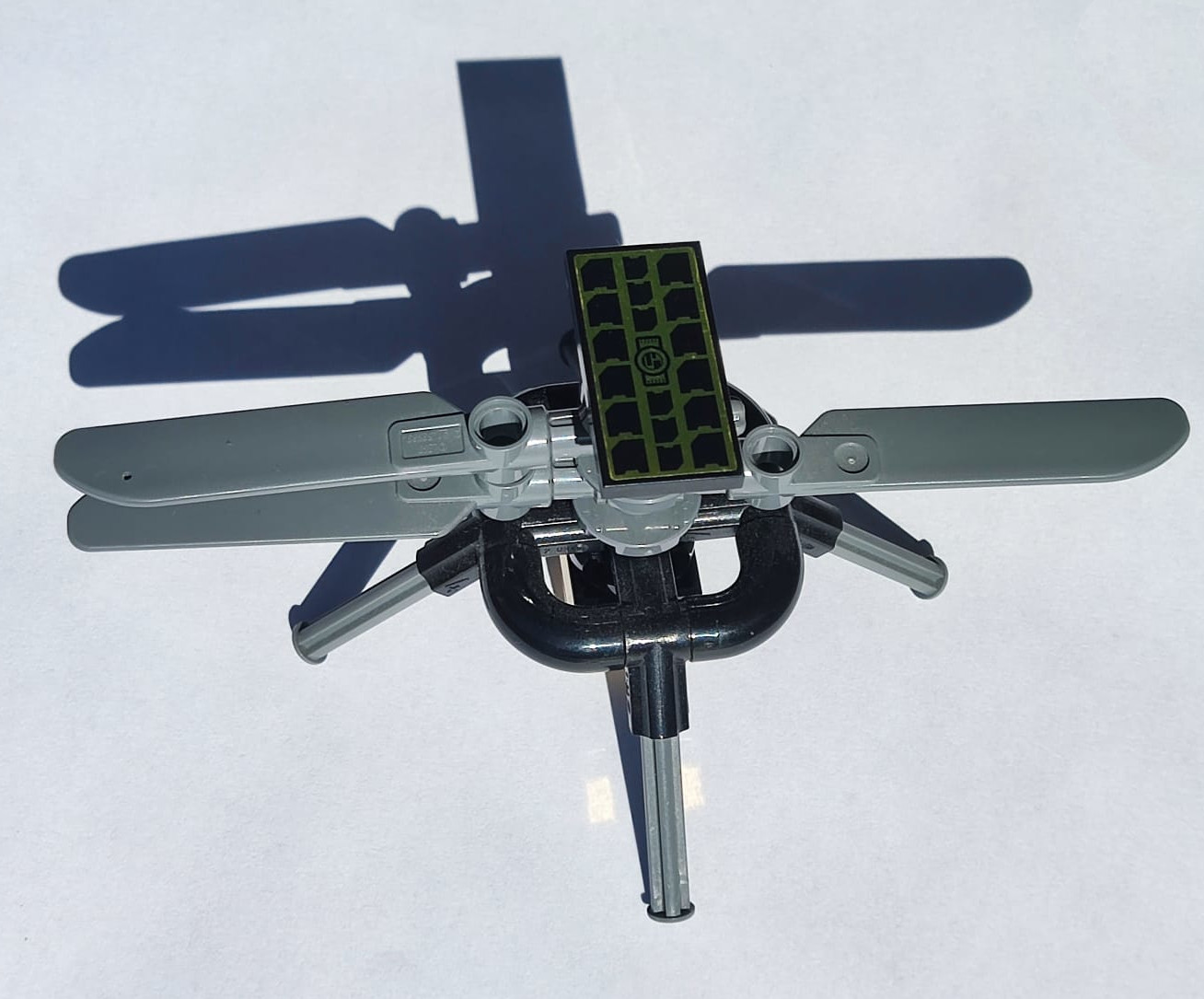
Come descritto brevemente in chiusura di News da Marte #25, a fine gennaio i tecnici NASA hanno avviato i test di movimentazione delle eliche di Ingenuity. Le prime verifiche hanno riguardato l’azionamento dei motori che svolgono la funzione di regolatore di passo, vale a dire il dispositivo che sugli elicotteri varia l’angolo di attacco delle eliche consentendo di gestire le fasi di volo. I motori coinvolti sono sei in tutto, tre per ciascun rotore separati di 120° (due di questi sono indicati con i numeri 6 e 10 nell’immagine sottostante). Questi motori sono impiegati anche per direzionare l’elicottero.

Il test dell’angolo di attacco, almeno a giudicare dai fotogrammi ricevuti, sembra dare esito positivo. A meno di fare una chiacchierata con i tecnici NASA coinvolti non possiamo conoscere nel dettaglio quale fosse l’entità dello spostamento desiderato, ma è perlomeno confermata la funzionalità dei motori dedicati. Ingenuity esegue tre verifiche a questo riguardo che vengono documentate con acquisizioni video ad alto frame rate con la sua NavCam.
Ho racchiuso i vari test sui regolatori di passo in un video che condensa qualche migliaio di fotogrammi.
Dopo queste verifiche è stato il momento di azionare i rotori (indicati con i numeri 1 e 7 nel disegno precedente).
Il Sol 1059 (11 febbraio) le eliche vengono ruotate per la prima volta eseguendo all’incirca un quarto di rotazione in senso orario. Questo test aggiunge un elemento importante nella ricostruzione dell’incidente perché per la prima volta si riescono ad osservare le quattro pale. O almeno questo era l’obiettivo, perché ne vengono rilevate solo tre.
Favorita da un angolo propizio del Sole, la camera di Ingenuity riprende l’esecuzione della rotazione e rivela così che una delle quattro eliche è totalmente assente. È a questo punto chiaro che si sia spezzata vicino alla base.
Così come per i test dell’angolo di attacco, numerosi fotogrammi sono stati acquisiti anche nel corso della movimentazione dei rotori. Ve li propongo in un altro video, sempre mostrati rispettando fedelmente i timestamp di esecuzione così come riportati nei nomi dei singoli frame.
Altre investigazioni di Perseverance
Nelle precedente puntata della rubrica avevo mostrato una prima osservazione che il rover aveva eseguito a inizio febbraio con il supporto dei 110 mm di focale offerti dalle MastCam-Z, le potenti camere zoom a sua disposizione.
Ho lavorato ancora a quelle immagini e vale la pena che ve ne proponga una rielaborazione.
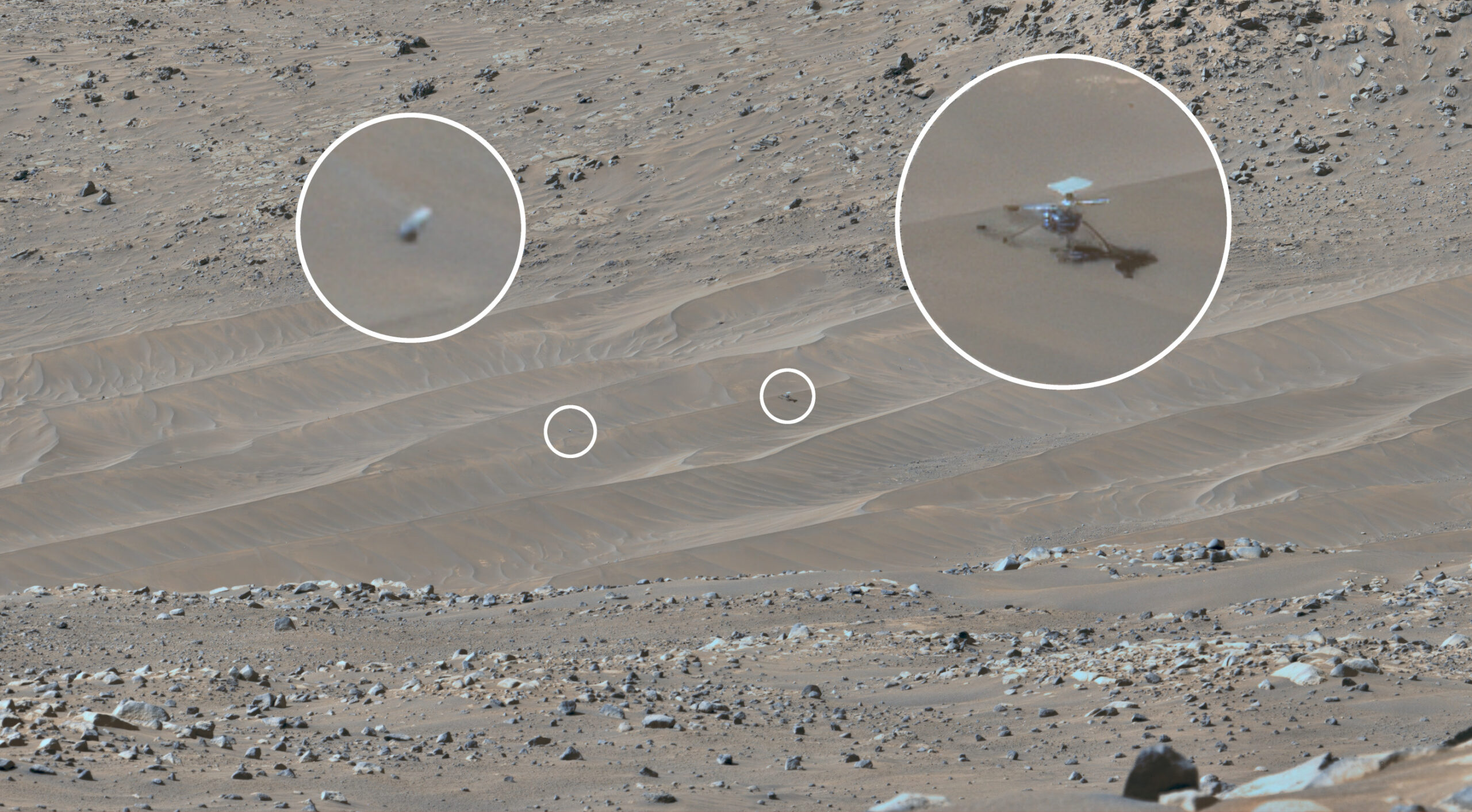
Oltre all’elicottero e ai suoi dettagli già analizzati, ben evidente circa 15 metri a sinistra anch’essa evidenziata e ingrandita, rinveniamo l’elica mancante che è stata proiettata verso sud dall’impatto.
Ma la migliore foto di Ingenuity danneggiato viene realizzata dal rover nella notte italiana del 25 febbraio. Lo scorcio marziano che vi mostro, catturato da 415 metri di distanza, è stato reso possibile dalla SuperCam, il piccolo telescopio montato nella “testa” di Perseverance che combina le funzioni di osservazione con l’uso di un laser per analisi spettrali.
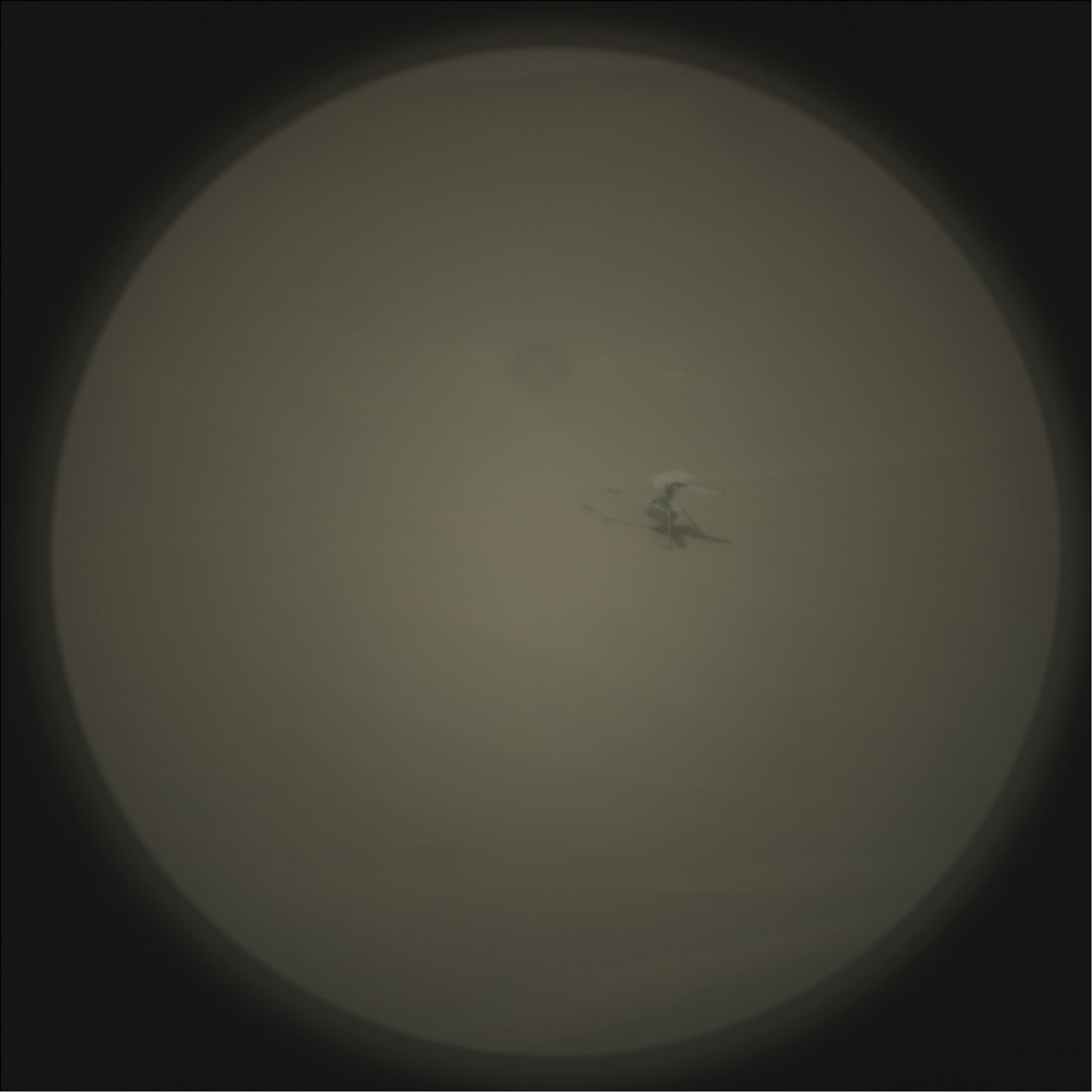
Immagine originale così come pubblicata nei siti ufficiali. NASA/JPL-Caltech/LANL/CNES/IRAPAmmiriamo Valinor Hills, il nome che è stato dato al luogo dove Ingenuity ha toccato terra per l’ultima volta. Il riferimento è al luogo inserito da J. R. R. Tolkien nel suo universo immaginario.
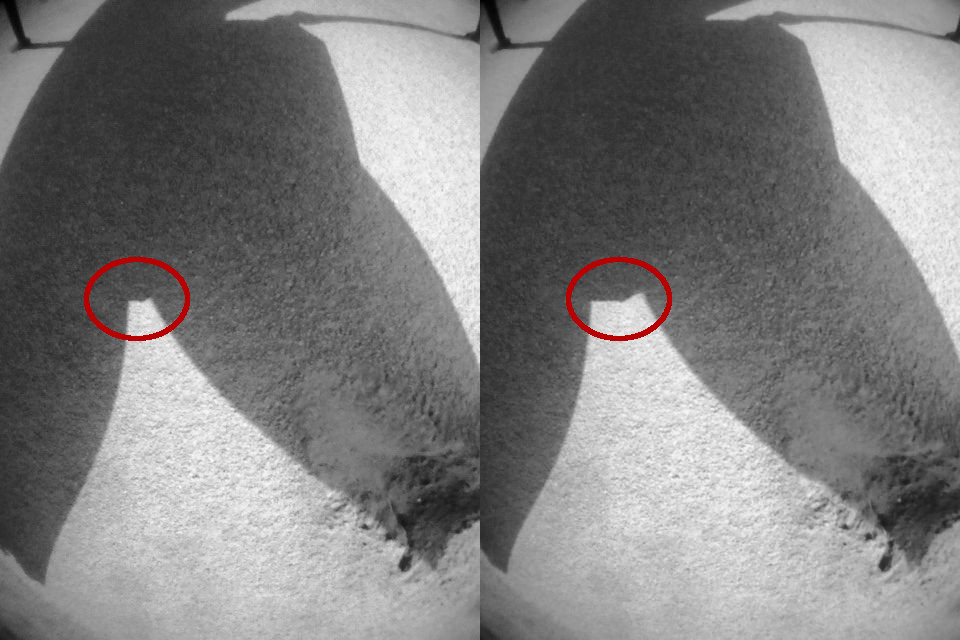
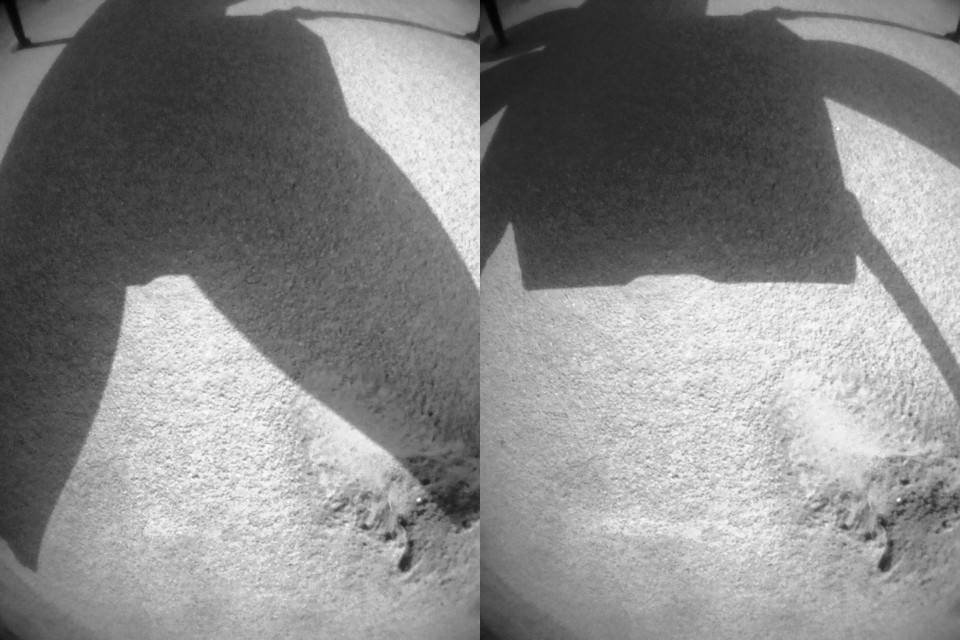
Le immagini, qui sotto elaborate e interpolate per cercare di esaltare i più piccoli dettagli, confermano parte delle ipotesi fatte sino a questo momento. Due macchie scure sulla sinistra del velivolo sono i punti dove l’elicottero è atterrato con violenza nel corso del suo 72esimo e ultimo volo. I rotori sono posizionati in modo diverso rispetto alla foto della MastCam-Z vista in precedenza: quello inferiore è orientato quasi verticalmente nell’immagine, il superiore è invece orizzontale ma mostra solo una delle due pale. Rinveniamo quella mancante nella seconda ripresa in cui si nota anche la traccia lasciata dall’elica sulla sabbia mentre veniva proiettata tangenzialmente.

Interpolando e ingrandendo ulteriormente la foto dell’elica scorgiamo il piccolo sistema di bilanciamento integrato nelle quattro pale di Ingenuity che prende il nome di Chinese weight. È quello spuntone alla base delle eliche progettato per bilanciare il peso dei rotori e ridurre lo sforzo dei motori che gestiscono il direzionamento dell’elicottero. Anche da oltre 400 metri di distanza si riesce a distinguere questo minuscolo particolare. Le varie peculiarità nella forma asimmetrica della pala parrebbero supportare questa ipotesi del vostro autore.
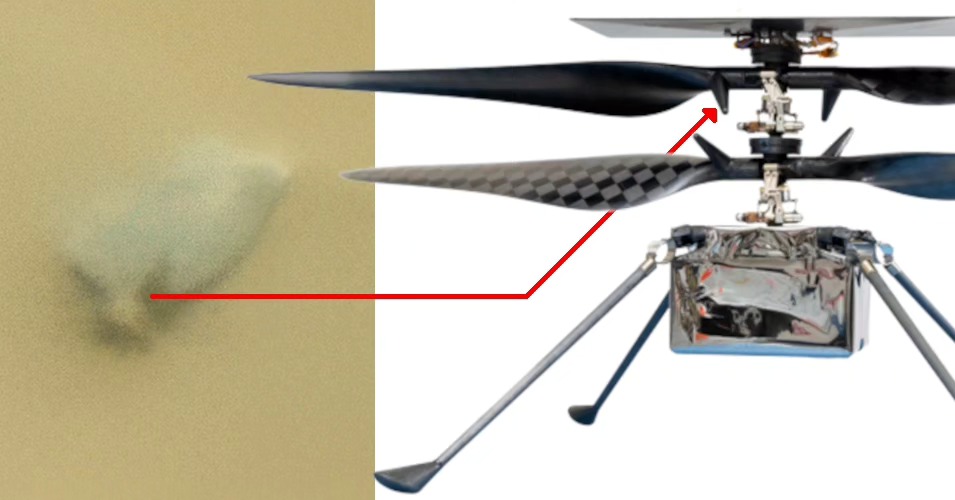
Queste nuove immagini danno supporto alla ricostruzione che un’elica possa essersi staccata dal rotore nelle fasi finali del volo e non, come ritenuto in precedenza, per un impatto col terreno. Sarebbe poi stata colpita dalle altre pale le cui punte si sono così danneggiate. In questo caso si tratterebbe quindi di un problema causato dall’usura meccanica subita da Ingenuity. Ma non si possono davvero muovere rimproveri ai progettisti di questo velivolo straordinario che ha volato per 72 volte (invece di 5 previste) accumulando poco meno di 129 minuti di volo nel corso dei quali si è spostato per complessivi 17 km.
Un intoppo anche per Perseverance
Oltre a Ingenuity, anche il rover sta trascorrendo un po’ di tempo a documentare la situazione di un suo problema. Fortunatamente non catastrofico, ma che potrebbe limitare le capacità di analisi a disposizione degli scienziati.
Tutto è iniziato il 6 gennaio, con Perseverance che in quei giorni stava eseguendo delle analisi di una lastra rocciosa. I programmi prevedevano di dare una soffiata alla superficie e procedere poi con le foto di PIXL, WATSON e SHERLOC.
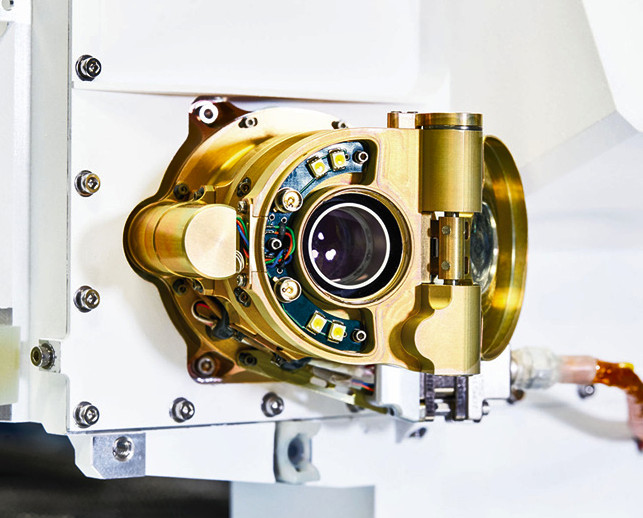
Tutto bene con i primi due strumenti che acquisiscono complessivamente 90 immagini ma non con lo spettrometro SHERLOC (acronimo di Scanning Habitable Environments with Raman & Luminescence for Organics & Chemicals). Quest’ultimo restituisce solo due immagini nere di calibrazione, scattate con il tappo. Quello che sarebbe considerato un errore marchiano per un fotografo, per SHERLOC fa in realtà parte della normale routine di esecuzione delle attività. La lente frontale dello strumento è infatti protetta da uno sportellino anti-polvere azionato elettricamente che integra al suo interno un bersaglio composto di una lega di alluminio, gallio e azoto con proprietà di semiconduttore. Le linee di assorbimento di questo target permettono agli scienziati di valutare variazioni nelle prestazioni del laser di SHERLOC.
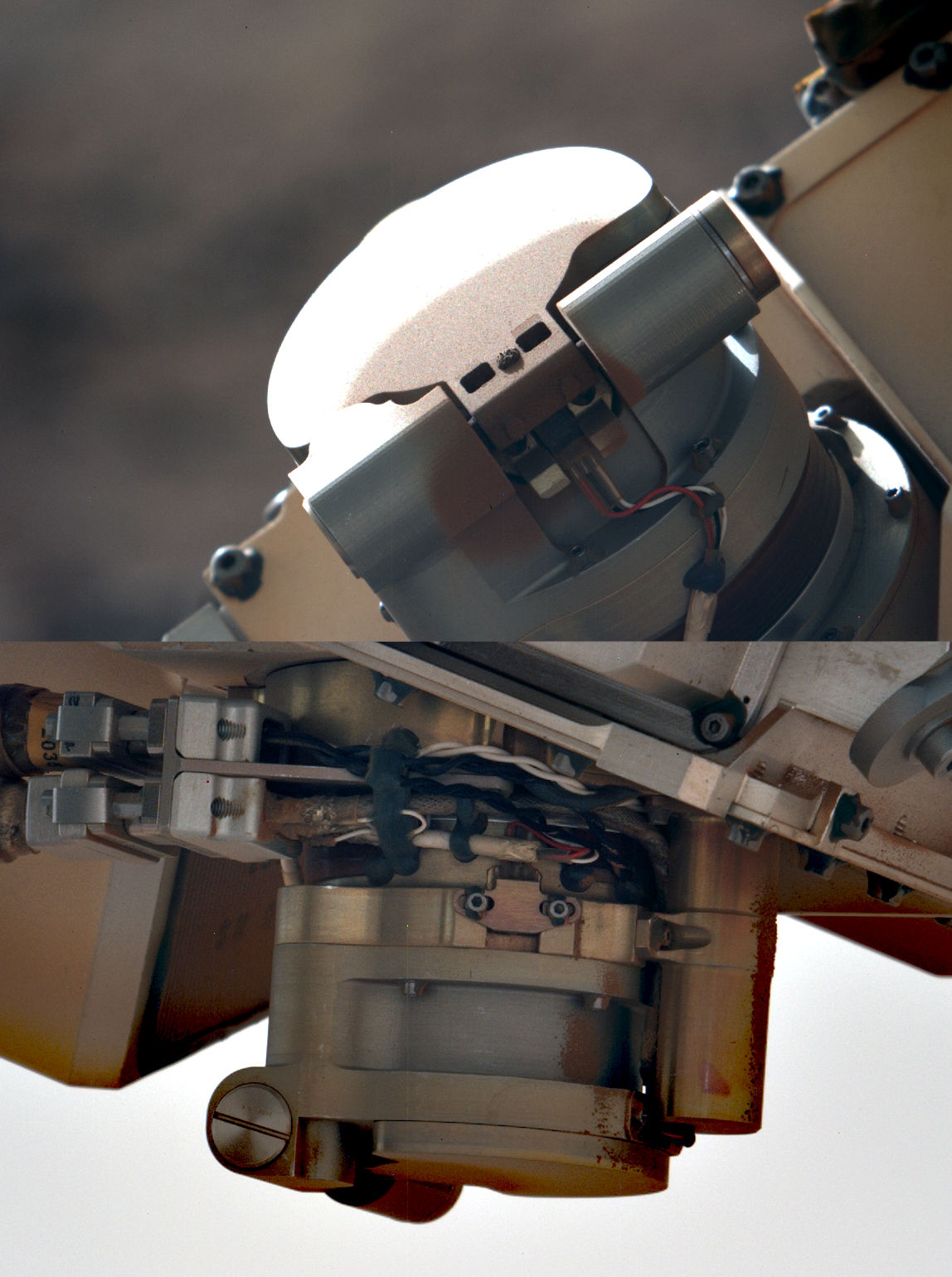
Il problema è che, oltre alle due foto di calibrazione, lo strumento non restituisce altre immagini. L’indomani alcune rilevazioni delle HazCam frontali iniziano a delineare l’intoppo: lo sportellino non si è aperto. Nei giorni che seguono i tecnici NASA alternano le operazioni scientifiche a ispezioni visuali della camera problematica, inviando anche comandi per aumentare progressivamente la potenza del piccolo motore dedicato all’apertura dello sportello.

Passano due settimane dalla prima manifestazione del problema e nel Sol 1037 (19 gennaio) sembra che qualcosa si sia mosso, sebbene solo in parte. Il tappo viene schiuso leggermente e SHERLOC rivede la luce del Sole, ma non è un grande risultato. La parziale apertura dello sportello combinata con la riflettività del suo interno agisce come uno specchio e ciò che si intravede è parte della struttura della camera stessa.
Nuovi tentativi di azionamento dello sportello avvengono il 2 e 17 febbraio ottenendo qualche grado in più di apertura ma senza avvicinarsi ancora alla risoluzione del problema. Nel caso SHERLOC non fosse recuperabile la missione di Perseverance perderebbe uno strumento molto utile per individuare i composti organici ma non totalmente insostituibile. Nella progettazione della suite scientifica è stato deciso di operare delle sovrapposizioni tra ciò che i vari strumenti possono osservare, e così parte delle specializzazioni in spettroscopia di SHERLOC possono essere coperte dallo strumento PIXL e dal laser della SuperCam. Si andrebbe tuttavia a perdere, delle 23 camere a bordo del rover, quella con la più alta risoluzione spaziale (30 micron/pixel).
Un’ultima curiosità riguarda un’acquisizione fotografica molto particolare che Perseverance ha eseguito il 27 gennaio (Sol 1044) mentre movimentava il braccio robotico e la torretta nell’ambito di alcune verifiche per cercare di sbloccare lo sportellino. Una delle MastCam-Z ha ripreso l’operazione della durata di circa tre minuti, ve la propongo velocizzata a 6x con l’aggiunta di etichette per indicare i vari strumenti. Nel corso di queste cronache marziane credo di averli nominati tutti, ma vale come ripasso!
Il video originale ha un discreto frame rate, ma l’incredibile fluidità è frutto di interpolazione dei fotogrammi.
***
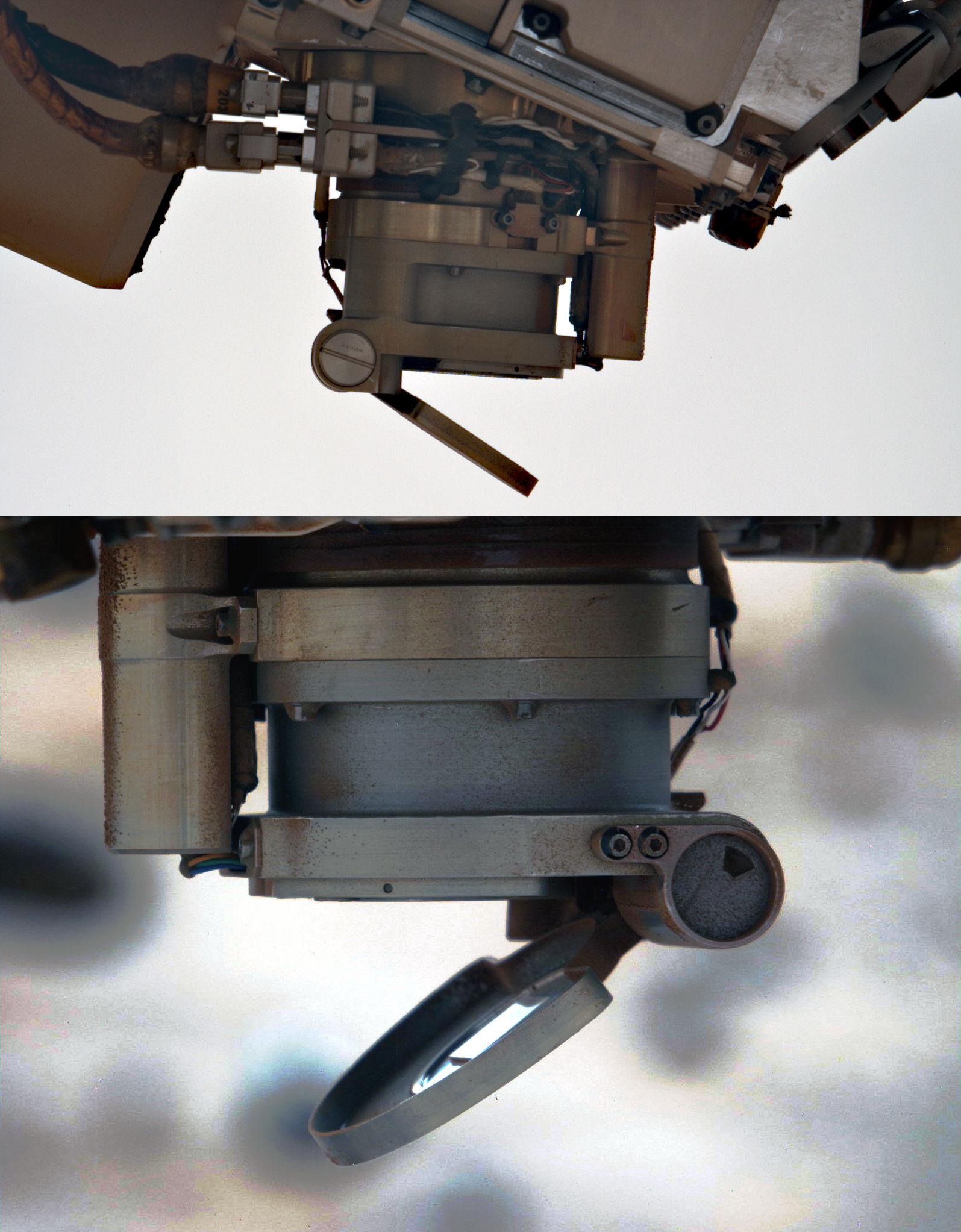
A pochi minuti dalla pubblicazione dell’articolo scopro il rilascio di nuove immagini della camera SHERLOC comparse in serata sul sito NASA. E sembra ci siano buone notizie.
I tentativi dei tecnici parrebbero aver avuto successo, sebbene l’apertura documentata non sia ancora completa (il tappo dovrebbe aprirsi di oltre 180°). Seguiranno aggiornamenti nella prossima puntata della rubrica.
Due satelliti per un pianeta
Il 20 gennaio e l’8 febbraio Perseverance ha compiuto osservazioni del Sole in corrispondenza di transiti indipendenti dei suoi due satelliti, Fobos e Deimos, catturandoli in movimento con delle acquisizioni video.
Il transito del 20 gennaio ha riguardato il minore dei due satelliti, con la luna Deimos che è apparsa transitare davanti al disco solare in circa 120 secondi. O per essere più precisi, in considerazione della velocità in cielo dei due corpi, è stato il Sole a sembrare muoversi dietro Deimos “sorpassandolo”. Il fenomeno è evidente in video, e ve lo mostro con questo confronto della reale acquisizione affiancata con la simulazione del fenomeno tramite il noto software astronomico Stellarium.
Il fenomeno dell’8 febbraio ha invece coinvolto Fobos. Data la maggiore velocità orbitale, frutto di una minore distanza da Marte, il satellite ha compiuto il transito in soli 36 secondi.
La visuale composita, frutto di un’evidente elaborazione ma che combina due frame reali delle rispettive riprese, mostra l’enorme differenza nelle dimensioni apparenti dei due satelliti irregolari del Pianeta Rosso. Si nota anche una piccola macchia solare appartenente alla ripresa di Deimos.
Le riprese in oggetto sono state effettuate con la MastCam-Z di sinistra a 110 millimetri di focale. Su questa camera è disponibile un filtro ND6, usato quasi quotidianamente per fotografare il Sole e condurre analisi sull’oscuramento atmosferico (il cosiddetto tau) legato alla presenza di polveri.

Anche per questo aggiornamento da Marte è tutto, alla prossima!









