
Bentornati su Marte!
Questo 20esimo appuntamento della rubrica è particolarmente ricco di immagini e video prodotti su Marte da tutti e tre gli apparati robotici messi in campo dalla NASA: Curiosity, Perseverance e Ingenuity.
Iniziamo con quest’ultimo, si parte!
Tre nuovi voli per Ingenuity e un’emergenza in volo
Durante la lunga sosta iniziata il 27 aprile, data del suo 52esimo volo, l’elicottero aveva sperimentato un blackout radio totale che si era risolto solo il 28 giugno quando Perseverance ha superato alcune collinette che bloccavano le comunicazioni radio tra i due apparati.

Il via libera per un nuovo volo è arrivato finalmente il 22 luglio con uno spostamento programmato verso nord di 203 metri da percorrere in circa 135 secondi. Il piano di volo era moderatamente complesso e prevedeva per Ingenuity una variazione di quota da 5 a 2.5 metri per dei rilievi fotografici mirati, e un’ascesa finale a 10 metri per permettere alla camera di navigazione di eseguire la consueta procedura di selezione dell’area di atterraggio. Ma le cose non sono andate come previsto.
Dopo soli 74 secondi di volo e 142 metri percorsi Ingenuity ha sperimentato un’anomalia che ha fatto avviare, per la prima volta da quando l’elicottero sta lavorando su Marte, il sotto-programma LAND_NOW che ha iniziato una sequenza di atterraggio d’emergenza.
L’elicottero ha toccato il suolo come da attese e senza rischi, dimostrando la robustezza dei software di volo.
Le analisi preliminari condivise dal team che gestisce le attività dell’elicottero portano a pensare che il computer abbia rilevato una discrepanza nella sincronizzazione tra le immagini della camera di navigazione e i dati rilevati dall’unità inerziale, cioè quell’insieme di sensori che permette di calcolare la posizione e orientazione del velivolo nello spazio circostante.
Un’anomalia simile era già avvenuta nel corso del volo numero 6 del 22 maggio 2021, quando un analogo disallineamento dei fotogrammi aveva portato Ingenuity ad oscillare pericolosamente avanti e indietro a 10 metri dal suolo. Da allora i programmatori hanno aggiunto una correzione al software di volo per gestire problemi simili, ma stavolta il numero di frame “fuori controllo” ha superato la quantità gestibile dalla patch.
In seguito all’anomalia, per ragioni non chiarite del tutto, Ingenuity ha perso i frame acquisiti durante lo spostamento. Si è così reso necessario un nuovo breve volo finalizzato all’acquisizione di immagini attorno alla zona di atterraggio per determinare con sicurezza la posizione.
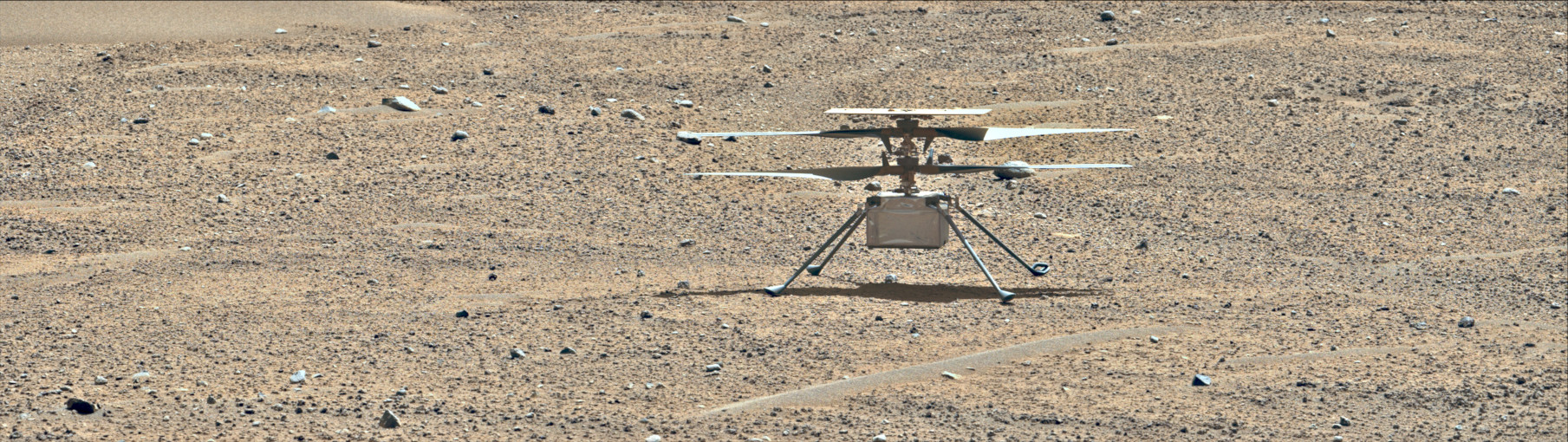
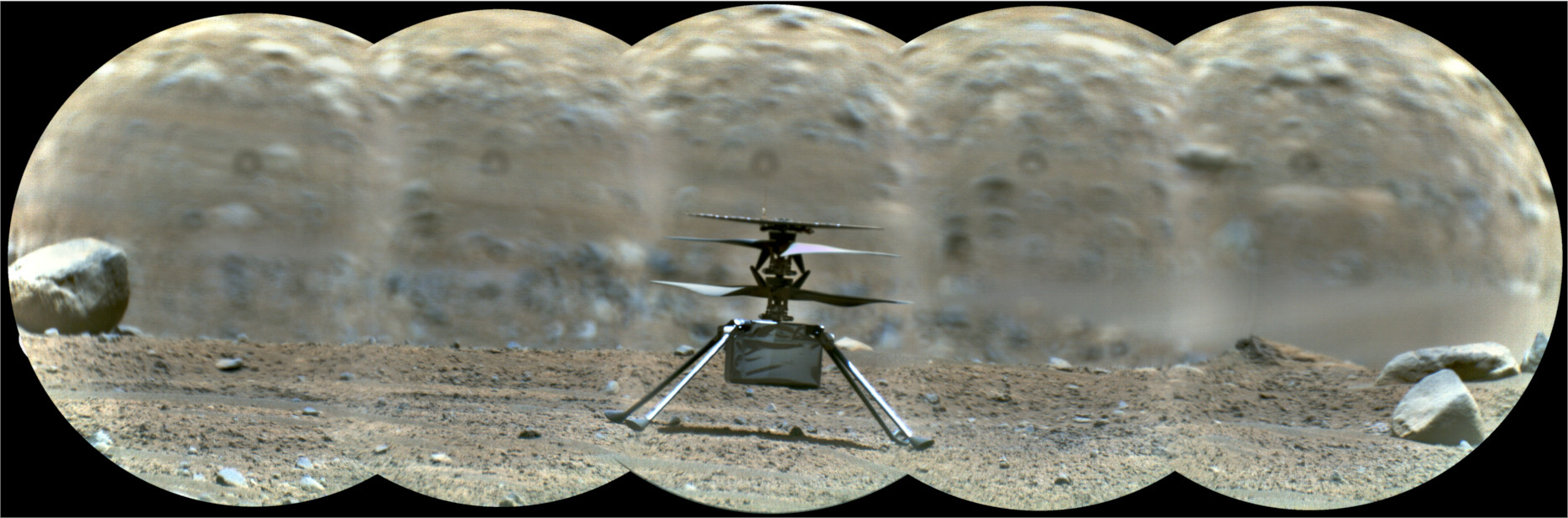
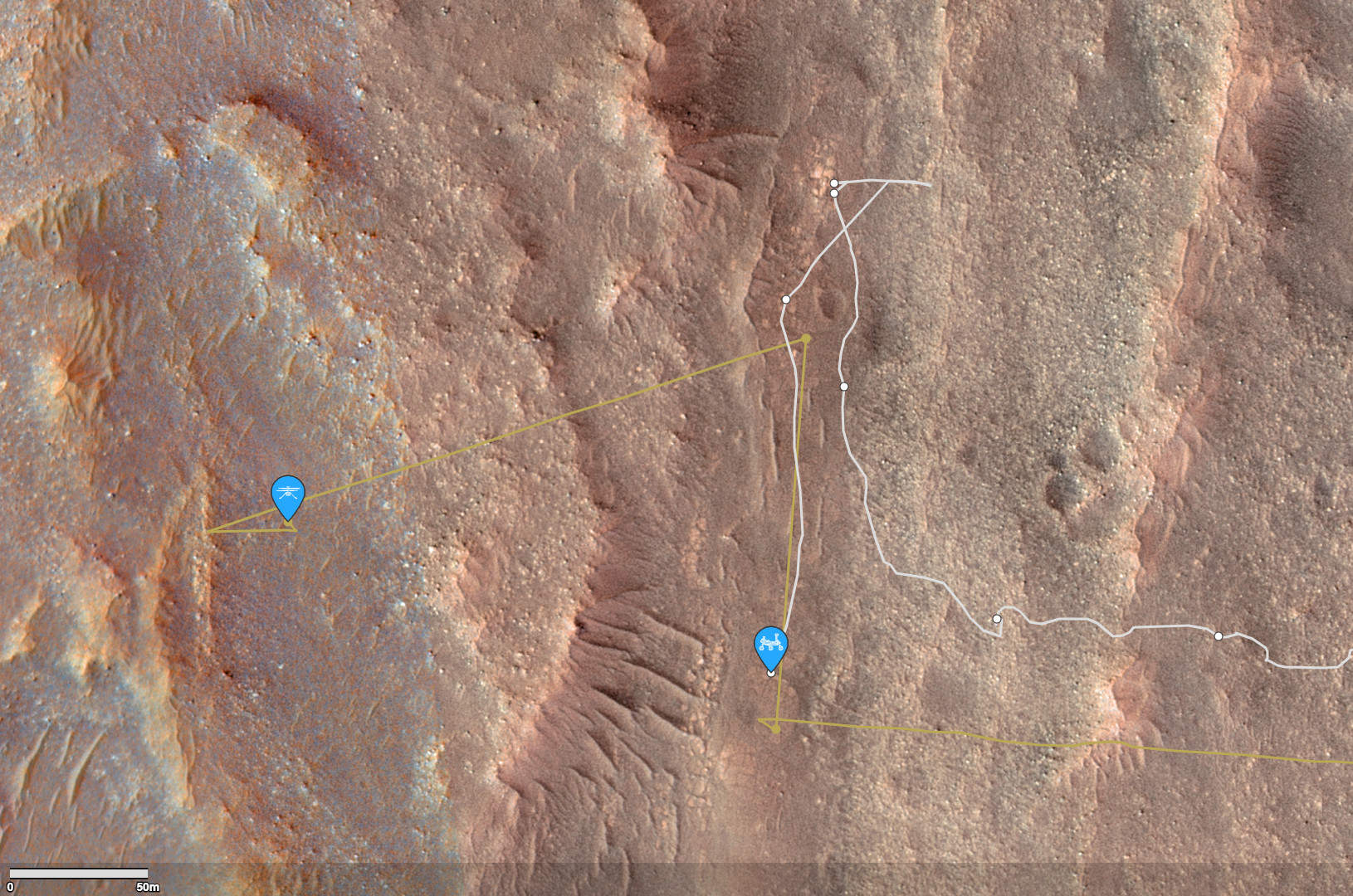
La nuova attività, la 54esima, ha avuto luogo il 3 agosto o Sol 872. A soli 50 metri di distanza si trovava Perseverance, così i tecnici non si sono fatti sfuggire l’occasione sia di fotografare l’elicottero che di filmarlo durante il breve volo in hovering sul posto.
Vi presento così il risultato della combinazione di quattro flussi video: due delle camere di Ingenuity e due dalle camere MastCam-Z di Perseverance. Ho incluso anche qualche sequenza prima del volo dove le pale dei rotori vengono fatte oscillare per modificare l’angolo di attacco.
Sicuramente degno di menzione anche un particolare dell’unica immagine a colori acquisita da Ingenuity, che nella parte superiore ha inquadrato il rover. Si notano anche le tracce lasciate sulla sabbia marziana dalle ruote.

Una volta appurato che l’elicottero era perfettamente operativo, è stato possibile riprendere i piani di esplorazione con il volo 55 che ha avuto luogo il 12 agosto. Nel corso di esso Ingenuity ha volato verso ovest per 264 metri in 143 secondi eseguendo una serie di fotografie delle aree sorvolate. Non ci sono molti fotogrammi a disposizione ma con i 32 sinora rilasciati ho potuto comporre un altro video che, a velocità tripla di quella reale, mostra il terreno esplorato dall’elicottero.
Con questo più recente spostamento Ingenuity raggiunge i 12503 metri volati, con una vita operativa di quasi 98 minuti. Questo piccolo elicottero raggiungerà mai i suoi limiti? Speriamo di no!
Perseverance: dure rocce, una punta rotta ma un prelievo nel sacco
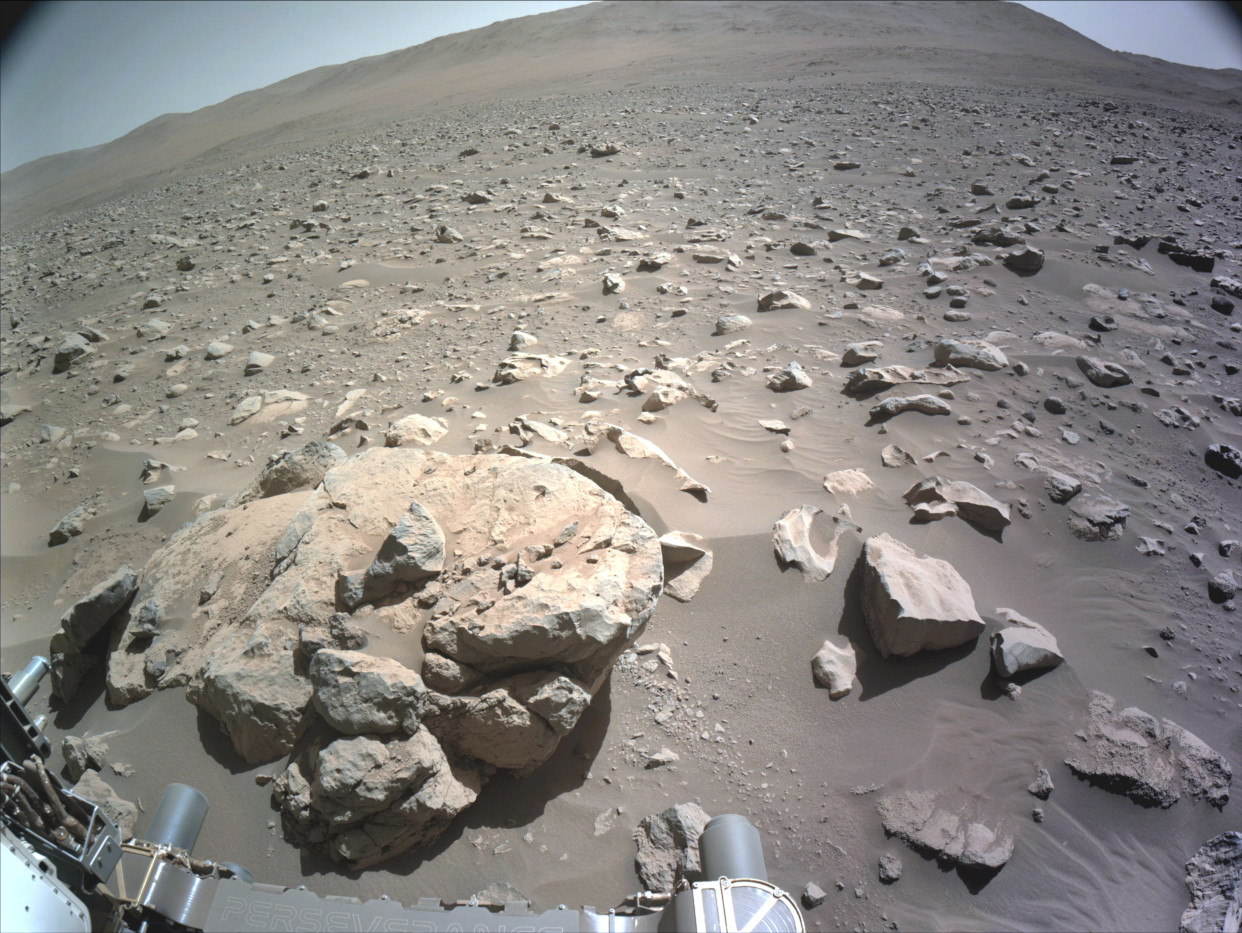
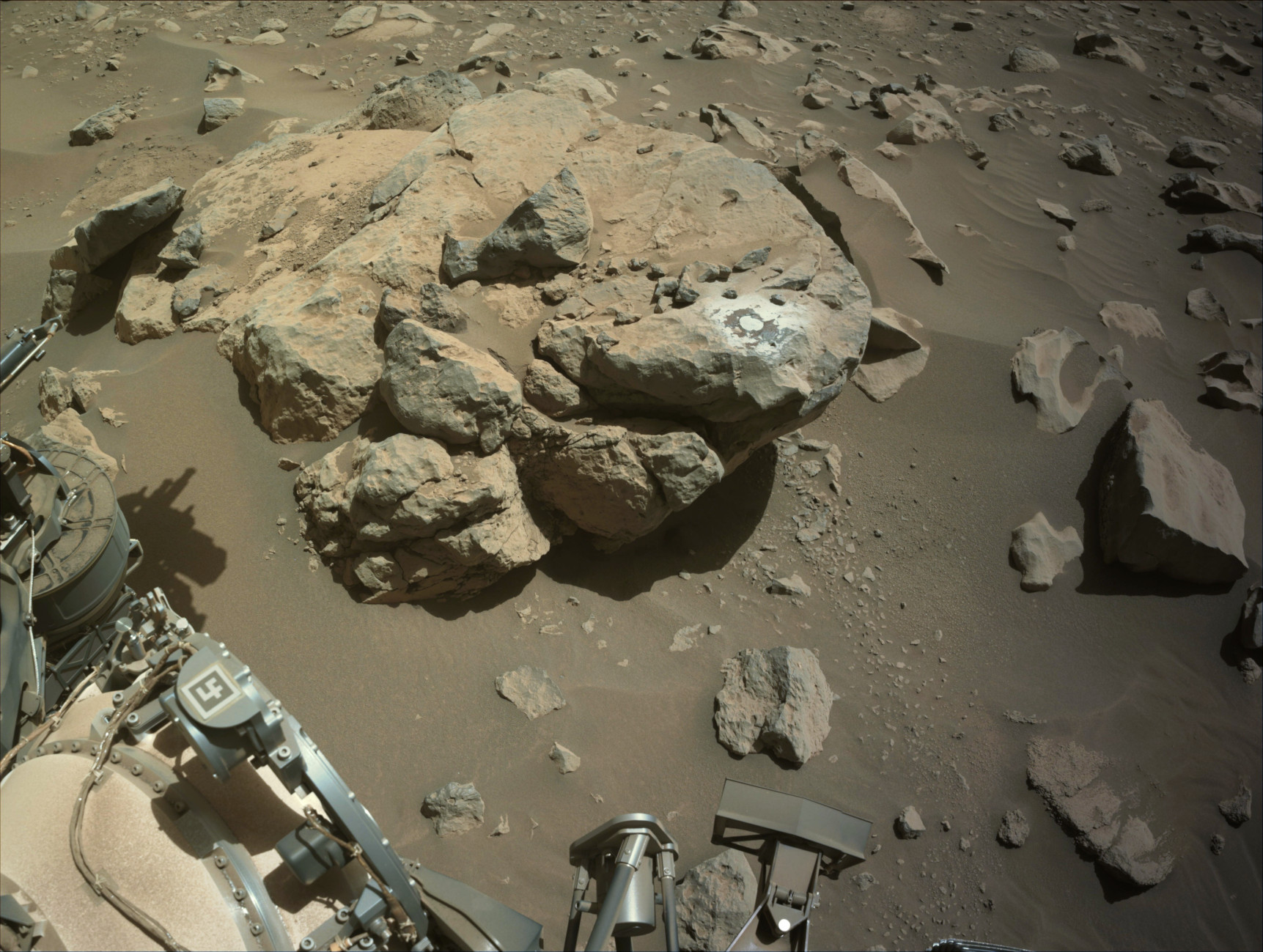
Nella precedente News abbiamo lasciato Perseverance impegnato con lo studio della roccia esposta dall’abrasione eseguita a Ypsilon Lake. Le analisi sono proseguite per 4 Sol, sino a quando il rover è stato fatto spostare di circa 80 metri verso est in direzione di un altro dei grandi massi che si trovano in questa regione. I geologi ritengono che queste pesanti rocce siano state trasportate da impetuosi flussi d’acqua che scorrevano qui miliardi di anni fa, fornendo così il potenziale per osservare materiali formatisi molto lontani dalle aree esplorabili dal rover.
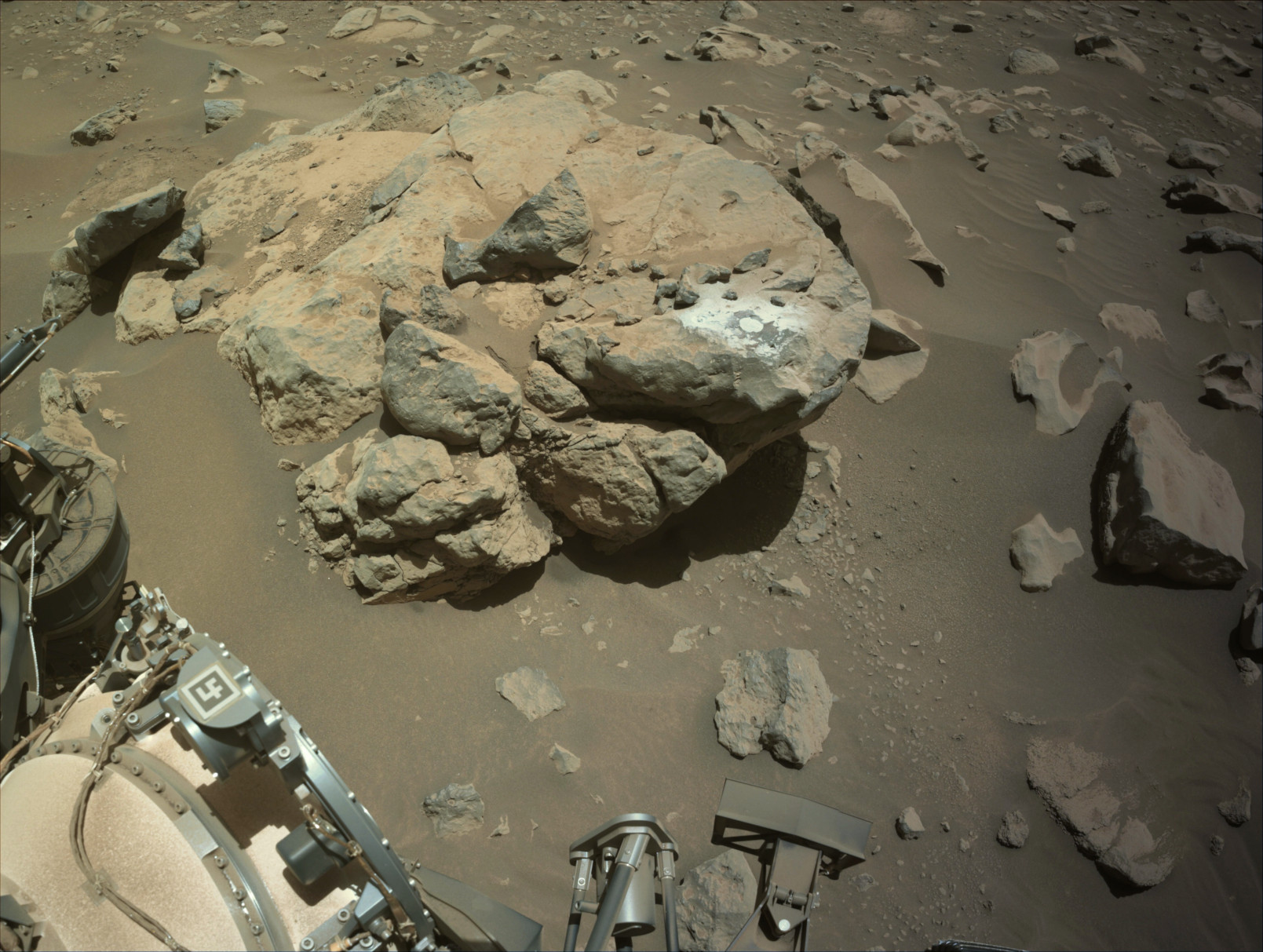
Nel Sol 856 (18 luglio) Perseverance raggiunge il grosso masso Dragon’s Egg, eccolo nelle immagini seguenti fotografato prima in gran dettaglio con un mosaico della MastCam-Z e poi con un po’ di contesto sul paesaggio circostante grazie alla NavCam.
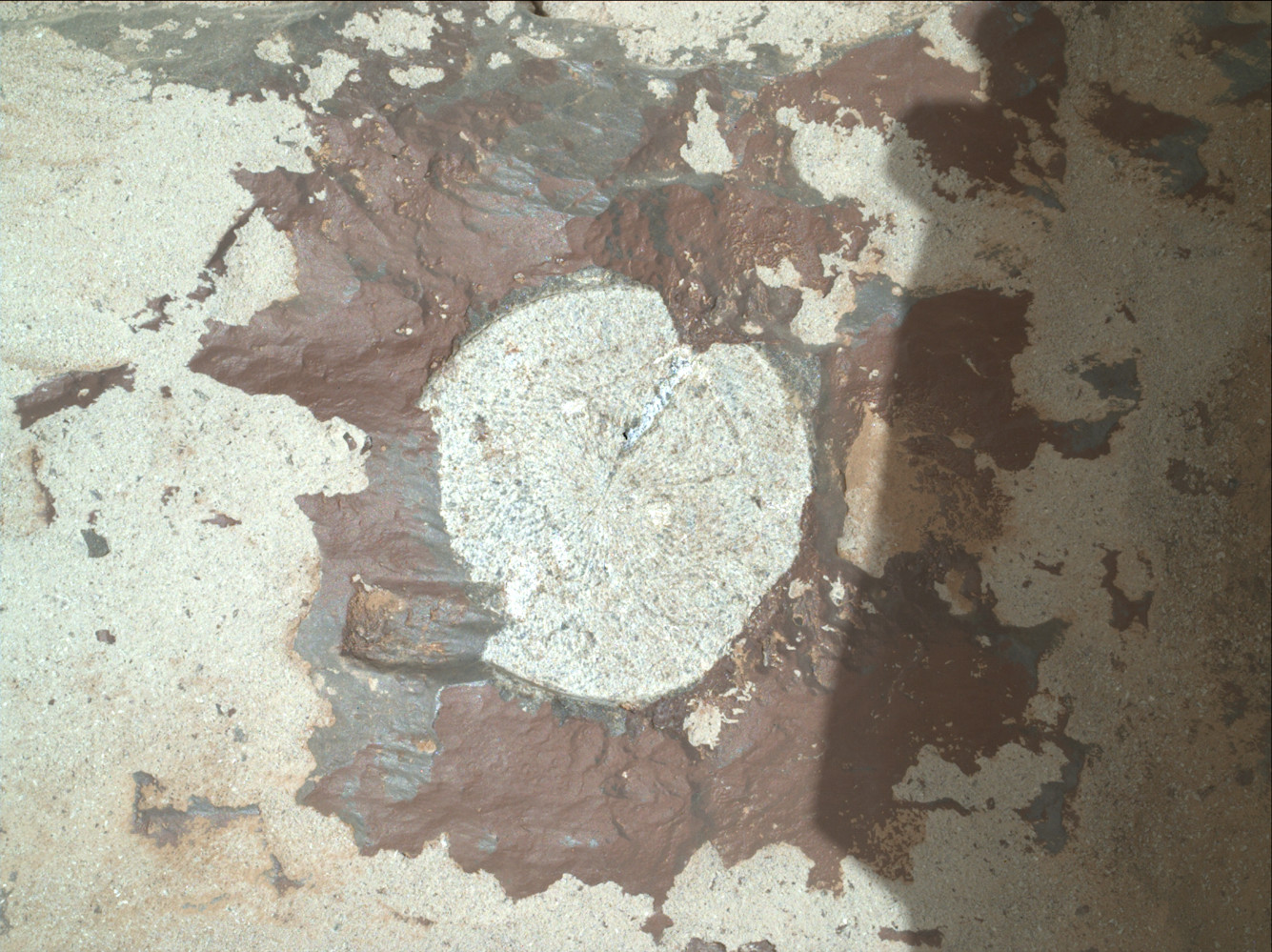
Le attività di contatto con la roccia hanno inizio nel Sol 858, quando il rover “assaggia” la pietra con la sua fresa producendo un’abrasione superficiale. Possiamo vedere l’azione nel seguente video che coglie una sequenza di 20 minuti.
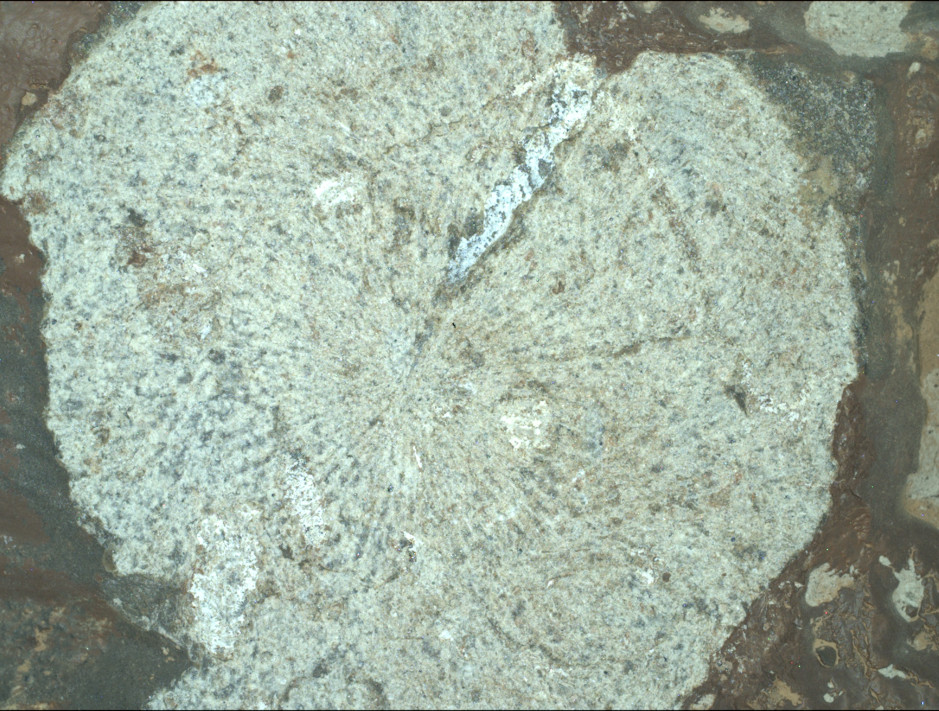
Come mostrato nel video, dopo circa 7 minuti l’operazione viene interrotta forse perché il software ha rilevato un insufficiente avanzamento nella roccia a causa della sua durezza. L’abrasione risultante, oltre a esporre gli strati superficiali della roccia, frattura la zona attorno alla fresatura portando alla luce delle aree con una colorazione molto scura. Queste risulteranno più evidenti dopo la pulizia della roccia tramite il soffiatore ad azoto.
Rocce del genere, con stratificazioni e rivestimenti superficiali, si formano per l’azione dell’acqua e di particelle minerali che vengono fissate. Sulla Terra sono coinvolti, talvolta, anche processi biologici attuati da batteri sebbene il loro ruolo non sia completamente chiaro.
Le osservazioni tramite la camera Watson sono ripetute anche di notte illuminando il target tramite i led che circondano l’obiettivo.
Il Sol 863 (25 luglio) è il momento di sfoderare la punta vera e propria e tentare un prelievo che sarà eventualmente battezzato Lost Lake.
Anche questa operazione viene documentata dalle HazCam anteriori e possiamo condensare in pochi secondi i 30 minuti di lavoro sulla roccia.
Il risultato delude però le attese. Dragon’s Egg si conferma un target estremamente duro: la punta non riesce a penetrare nella roccia e uno dei suoi quattro denti addirittura si spezza (ma non temete, il rover è dotato di un ampio set di punte intercambiabili).

Il team che controlla il rover accetta di buon grado che Dragon’s Egg non vuole svelare troppo dei propri segreti, quindi dopo un ulteriore giorno di analisi il rover viene fatto spostare verso nord-ovest per indagare altre rocce, stavolta dei basamenti sedimentari già adocchiati da Ingenuity nel corso del volo 52, che si spera si rivelino più amichevoli.
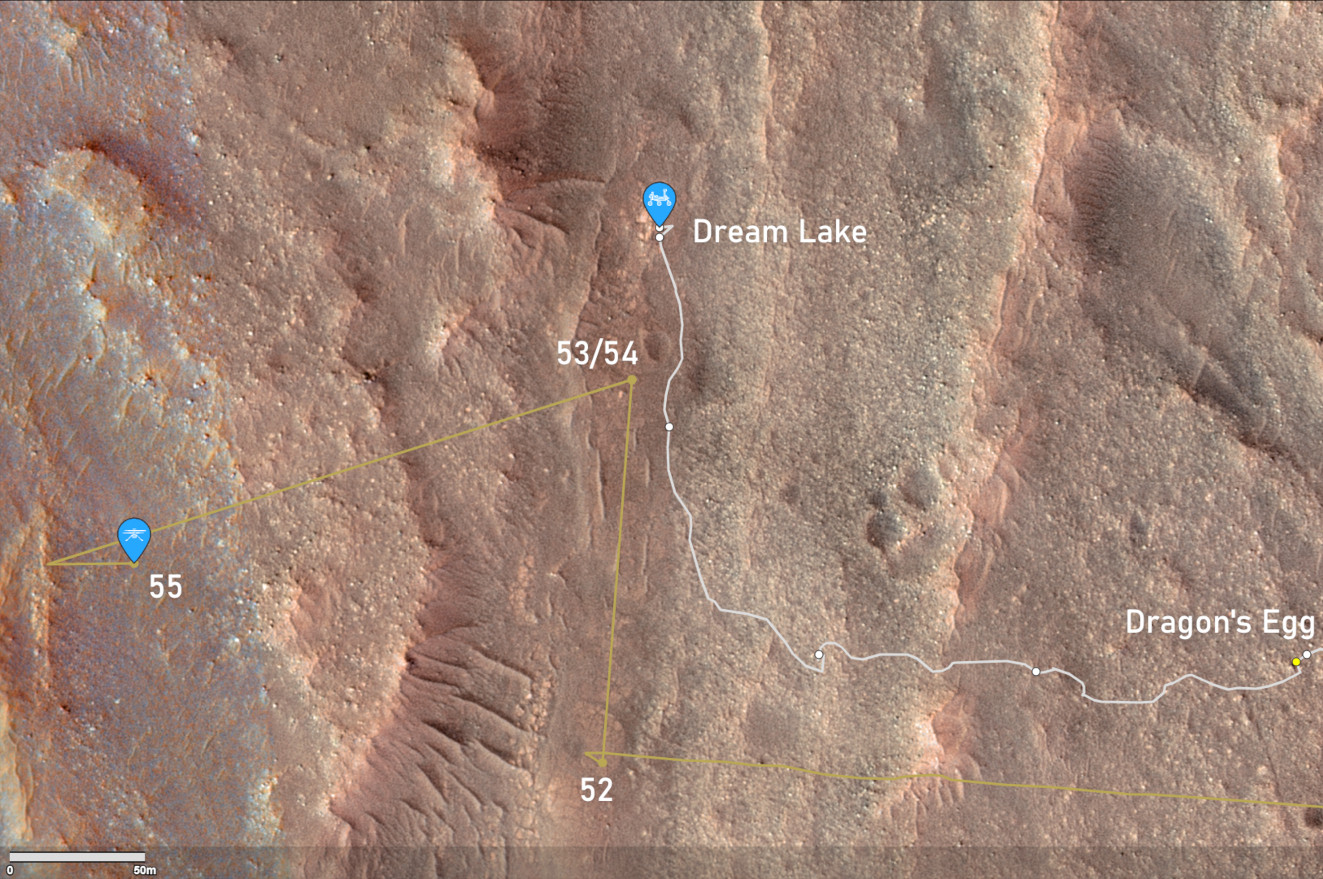
Nel corso di cinque giorni, tra i Sol 866 e 871, Perseverance percorre circa 420 metri giungendo nella località Dream Lake (nei pressi della quale era probabilmente destinato ad atterrare l’elicottero nel corso dell’incompleto volo 53). E a proposito di Ingenuity: nel Sol 871, alla vigilia del volo di verifica del posizionamento raccontato nel precedente paragrafo, il rover si trova a circa 50 metri dall’elicottero. La posizione è ottima per fotografarlo e ciò viene fatto nel Sol 871 con la MastCam-Z (producendo la foto che vi ho mostrato nel paragrafo precedente) e qualche tempo dopo, Sol 879, con il piccolo telescopio della SuperCam.
Ma torniamo al nostro rover.
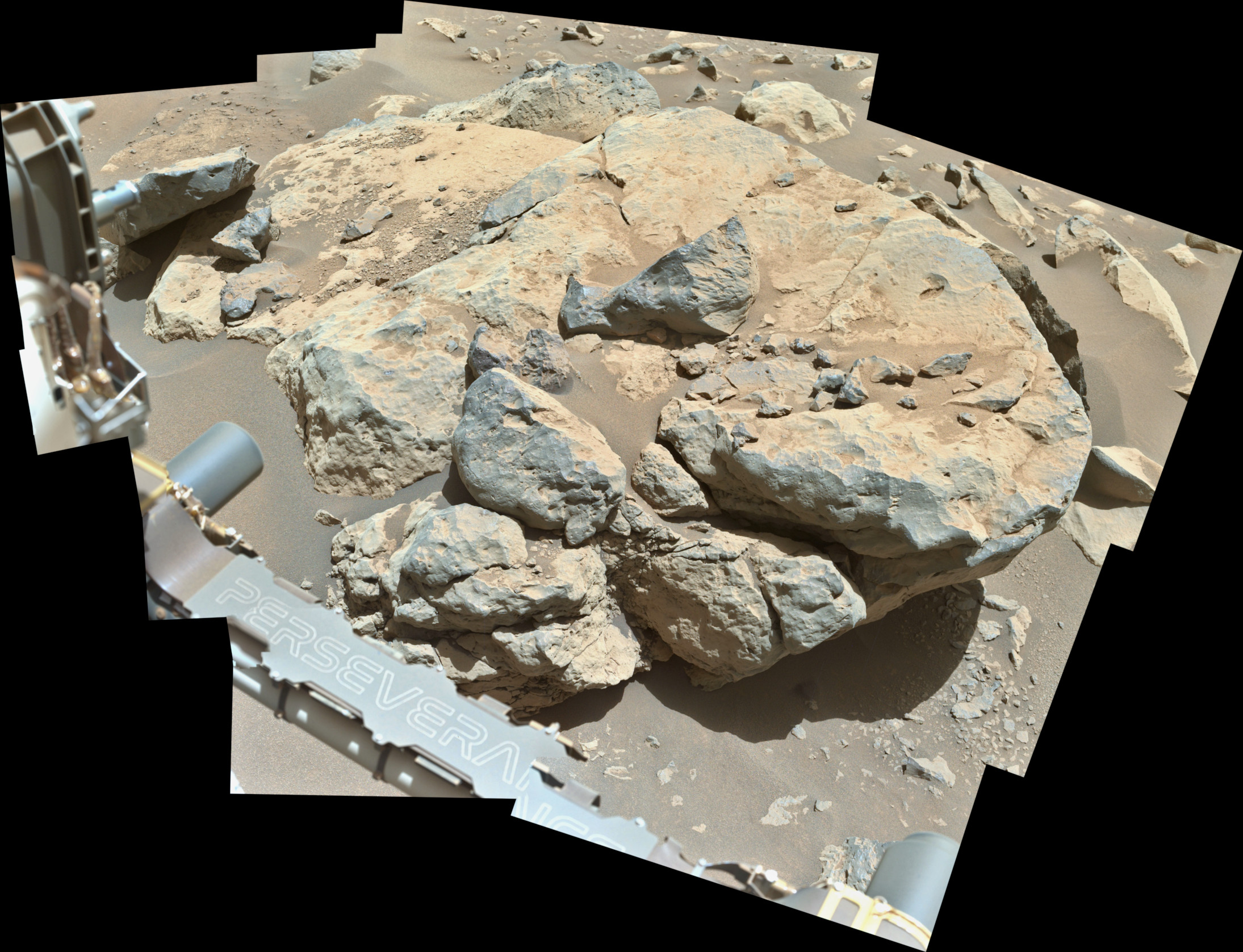
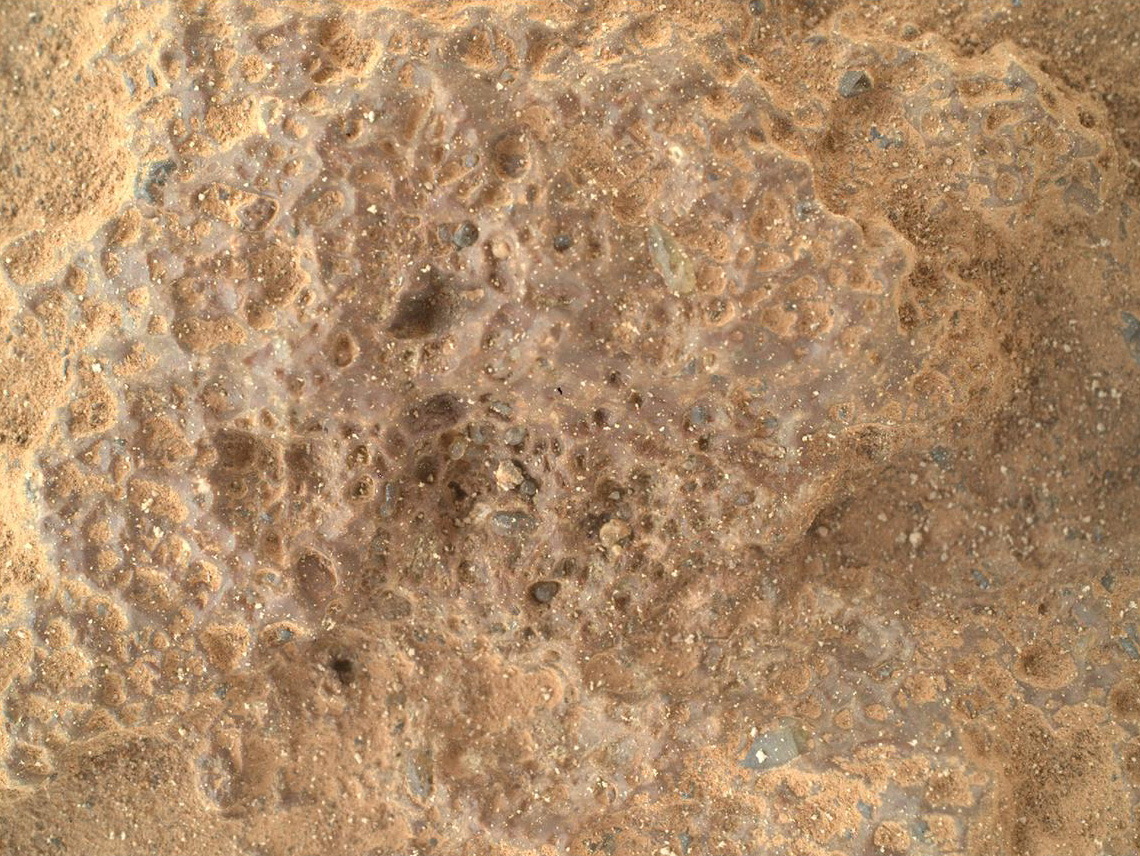
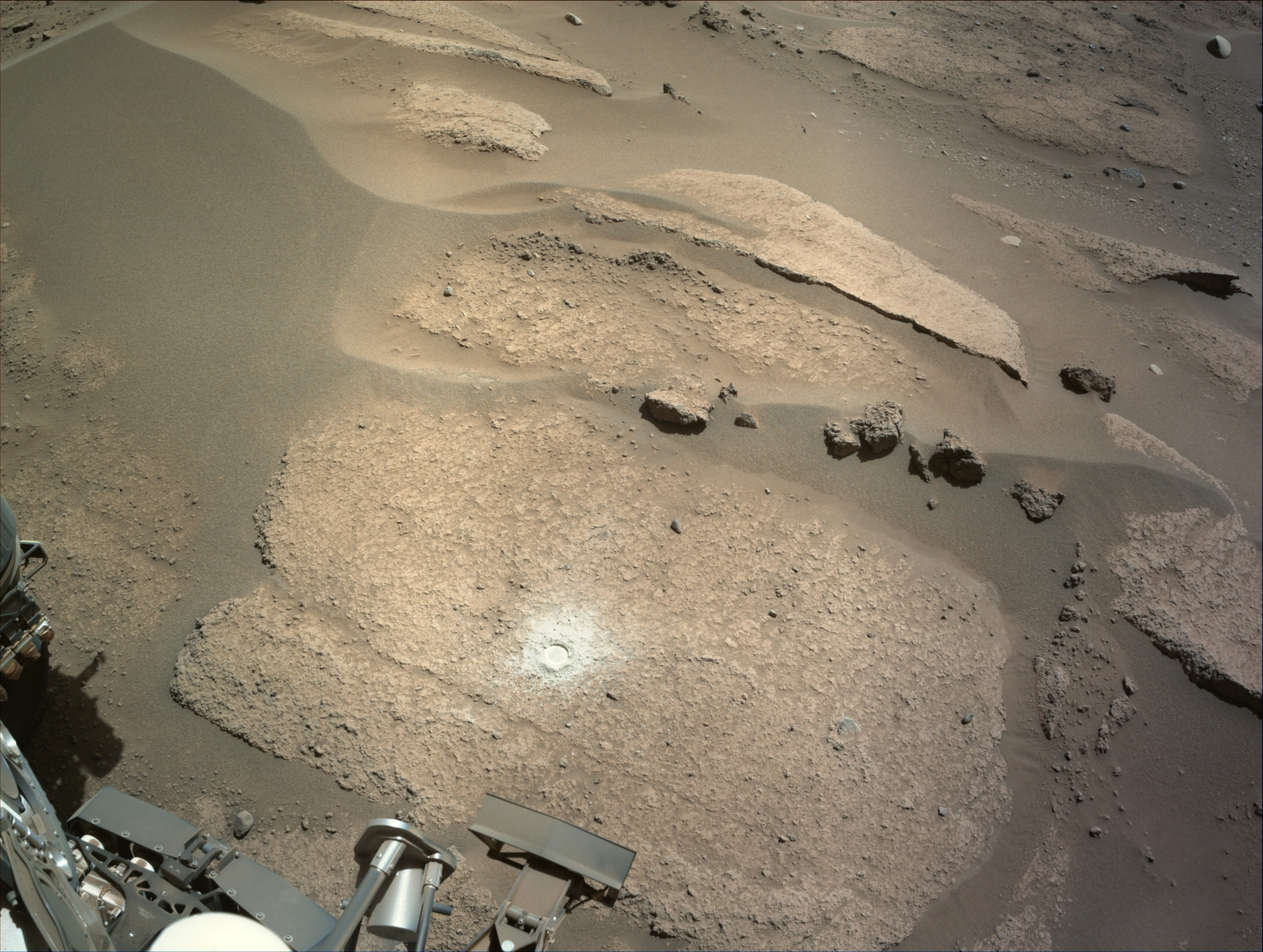
Con l’arrivo a Dream Lake Perseverance inizia a dedicare le proprie attenzioni a un’ampia lastra rocciosa che viene ripulita per mezzo del soffiatore ad azoto gDRT portando alla luce strutture molto interessanti insieme a conglomerati di minerali.
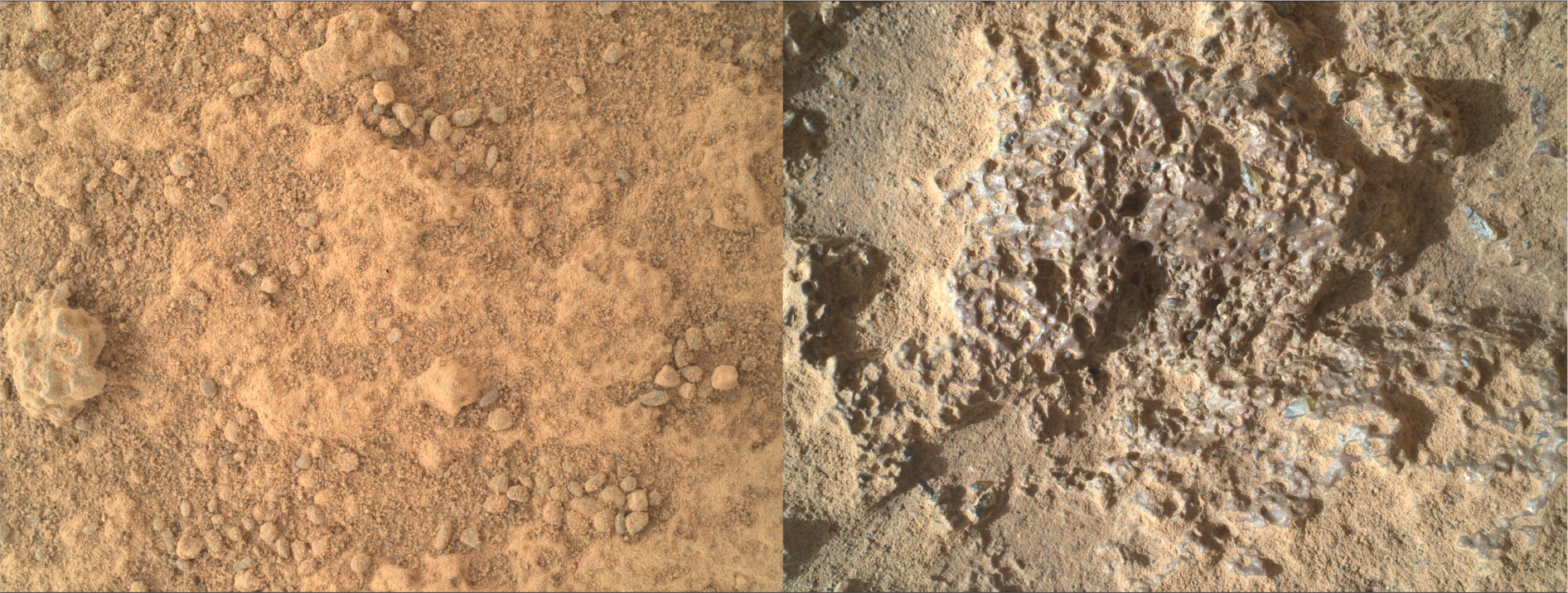
Osservazioni più dettagliate rivelano la presenza di piccole gemme incluse nella roccia il cui colore verde fa presumere si tratti di olivina, un minerale già incontrato in precedenza da Perseverance.
Questa stessa roccia qualche giorno più tardi (Sol 877, 8 agosto) viene raschiata con la fresa esponendo materiali freschi che vengono in seguito analizzati dagli strumenti.

Gli scienziati si mostrano soddisfatti delle analisi e interessati alla roccia Dream Lake, così nel Sol 882 (13 agosto) il rover viene comandato per tentare un prelievo.

Il prelievo stavolta ha successo, il rover riesce a estrarre il campione di roccia da Dream Lake! Poche ore dopo il carotaggio è già stato consegnato al Sample Handling Arm per le foto di verifica.
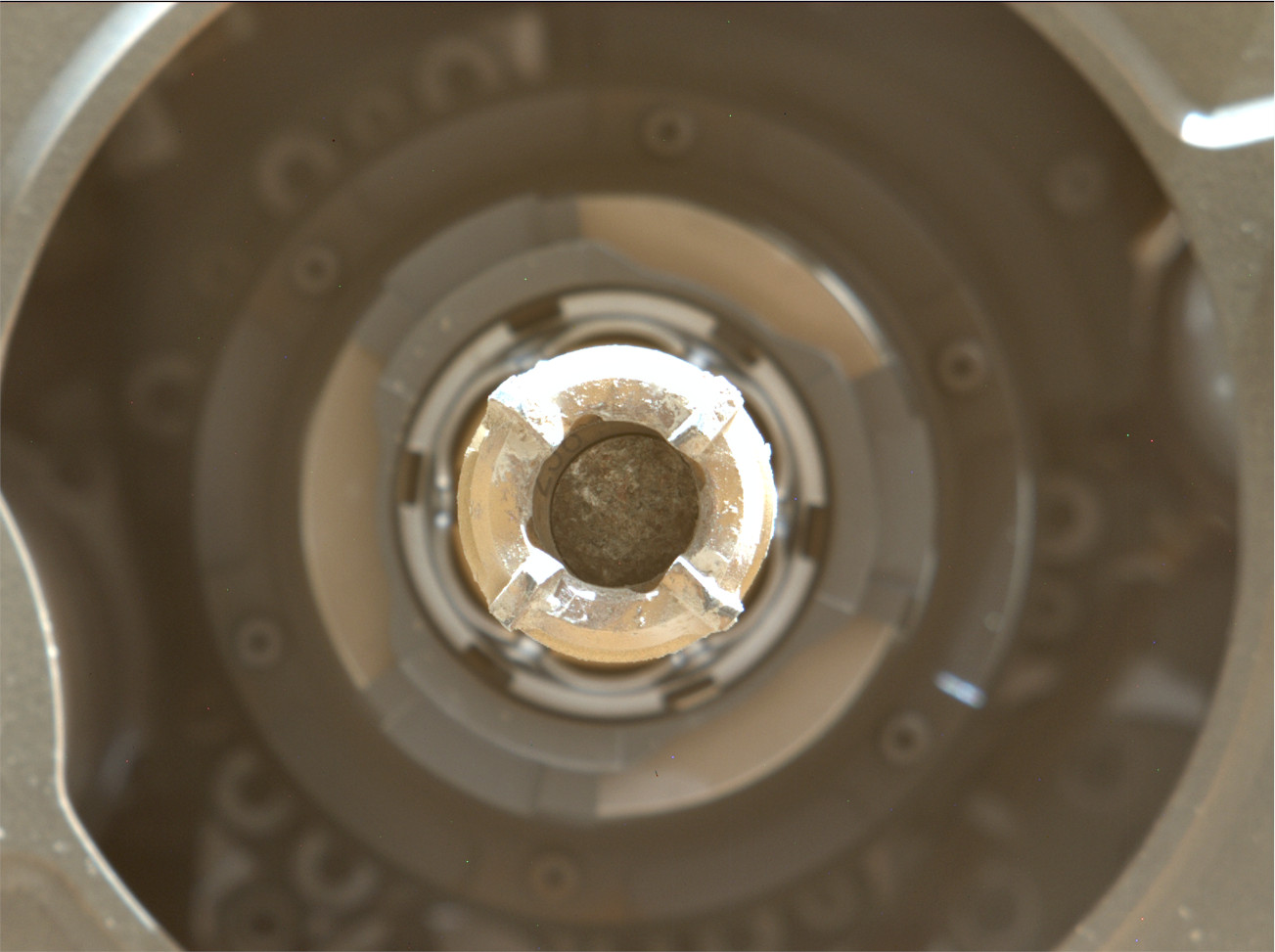
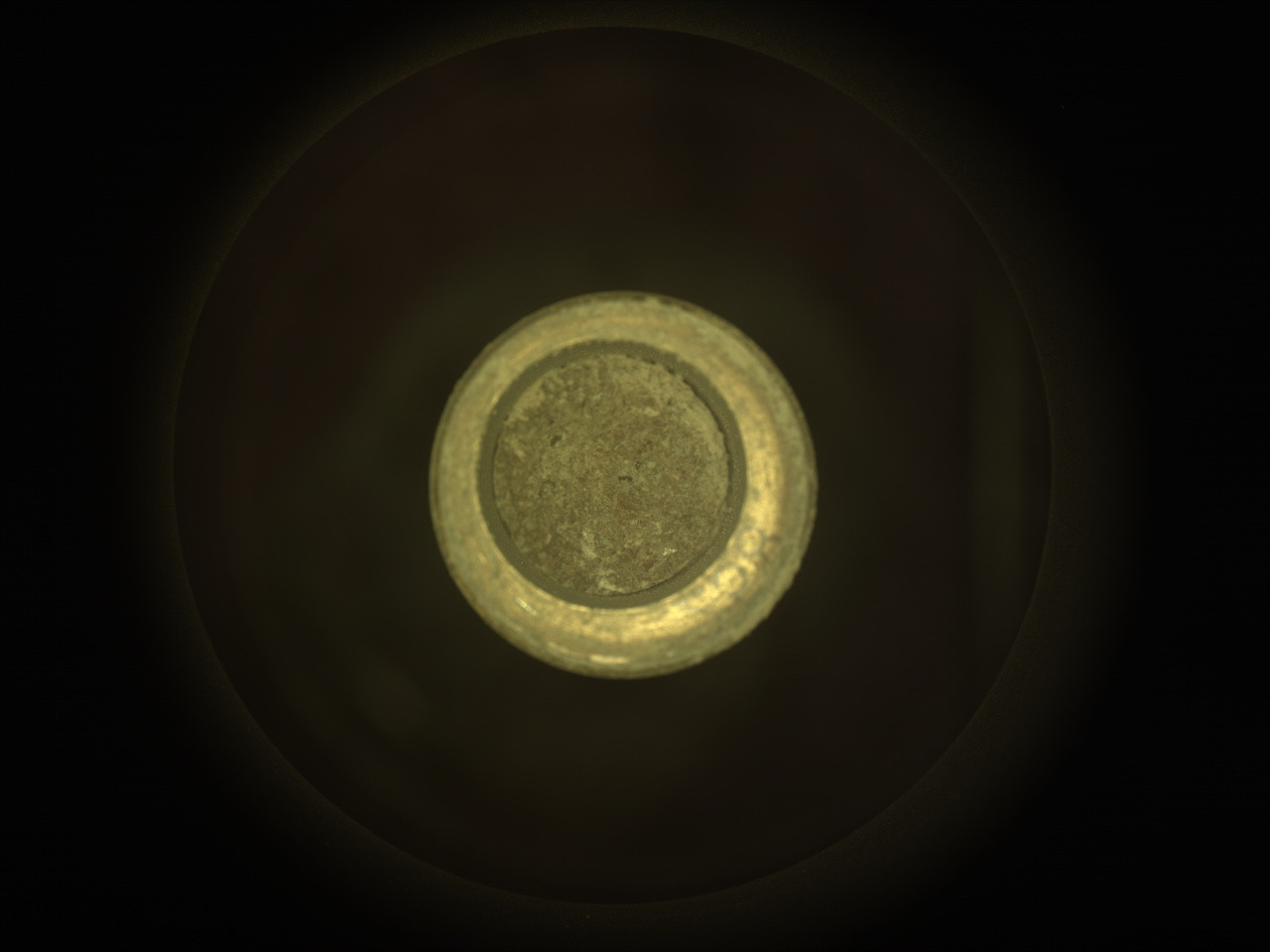
Al momento della chiusura dell’articolo non c’è conferma, né dalle immagini grezze né nella pagina dedicata all’elenco dei campioni raccolti, del fatto che la fiala sia stata sigillata.
Nel frattempo la movimentazione del rover non è ostacolata, tant’è che nel Sol 884 Perseverance ha iniziato uno spostamento verso sud dove studierà un nuovo affioramento roccioso. Potrebbe essere una variante di quello appena studiato o presentare un’origine geologica completamente diversa. Inoltre non sono terminate le investigazioni sui grandi massi portati qui dalla forza dell’acqua in quanto gli scienziati sono ancora desiderosi di mettere le mani sopra uno di questi campioni.
Al termine di questi piani il rover si dirigerà verso ovest nella zona di confine tra il letto dell’antico fiume e il suo bordo in un luogo chiamato “Mandu Wall”. Questo segnerà la conclusione della corrente Upper Fan Campaign (che possiamo tradurre come ‘Campagna dell’alveo superiore’) e l’inizio di una nuova campagna per investigare le formazioni rocciose ricche di carbonati lungo il bordo interno del Cratere Jezero.
Deviazioni e scalate per Curiosity
Nonostante abbia raggiunto a inizio agosto gli 11 anni di lavoro su Marte il veterano dei rover marziani non conosce riposo.
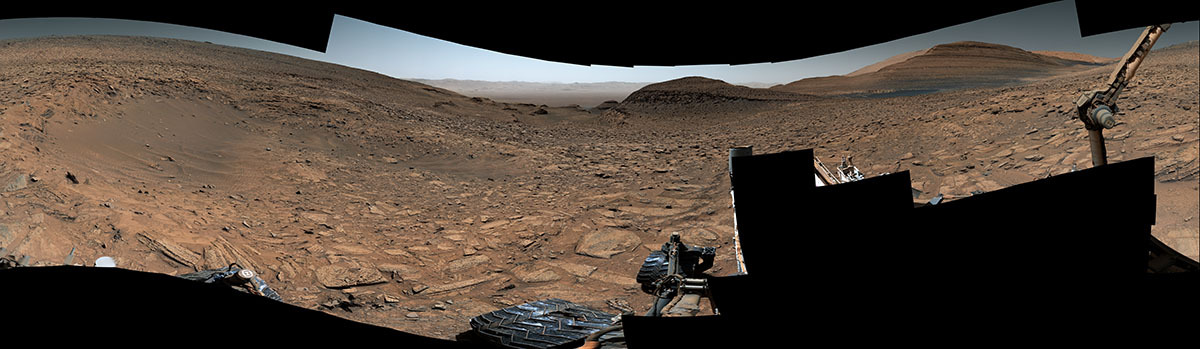
Le passate settimane l’hanno visto impegnato per ben due mesi in una scalata molto ripida, la più difficile mai affrontata, che attraverso dislivelli sino a 23° l’hanno portato a giungere sano e salvo nella località “Jau”, caratterizzata da numerosi crateri da impatto larghi sino a 25 metri.
Ma per farlo i tecnici in controllo del rover hanno dovuto lavorare duramente dopo che sette tentativi di superamento del dislivello erano falliti, bloccando anticipatamente l’esecuzione programmata degli spostamenti a causa dell’eccessivo slittamento delle ruote.

Si è così dovuta cercare di una via alternativa percorribile per il rover che in ogni caso, a fronte di un notevole allungamento della distanza (la deviazione è stata di circa 150 metri), non avrebbe garantito la riuscita della traversata. Questo perché nella pianificazione del percorso le immagini satellitari aiutano solo sino a un certo punto, le particolarità del terreno da attraversare possono essere valutate solo una volta che siano osservabili direttamente da Curiosity.
Non è la prima volta che gli ingegneri si sono trovati davanti sabbia, rocce e salite, ma Marte non aveva mai posto queste tre difficoltà al rover contemporaneamente.
Il lavoro congiunto dei programmatori del percorso con la loro conoscenza del rover, dei geologi per distinguere le aree sicure e quelle pericolose, persino di figure specializzate che valutano la copertura satellitare nel caso di attraversamento di canyon particolarmente ripidi, ha reso un successo i due mesi di lavoro per guidare Curiosity verso una via sicura.

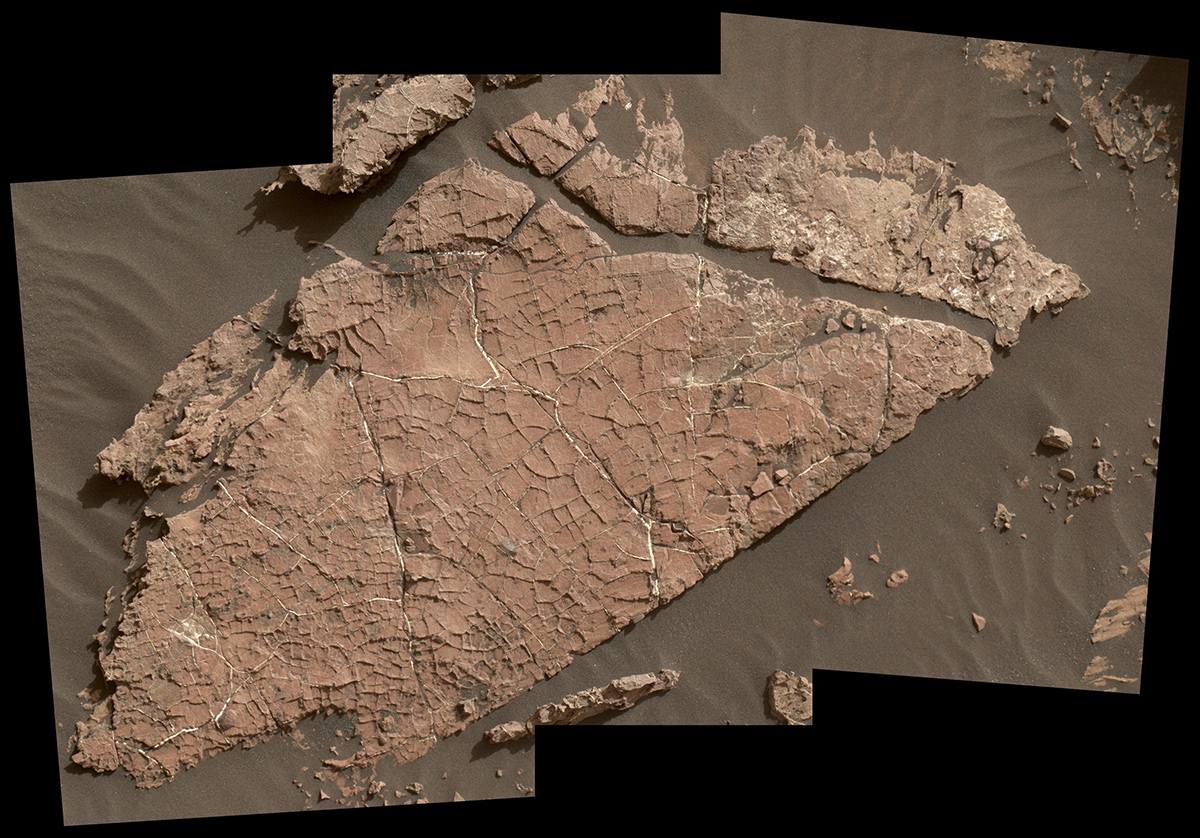
Le strane crepe nel fango viste da Curiosity
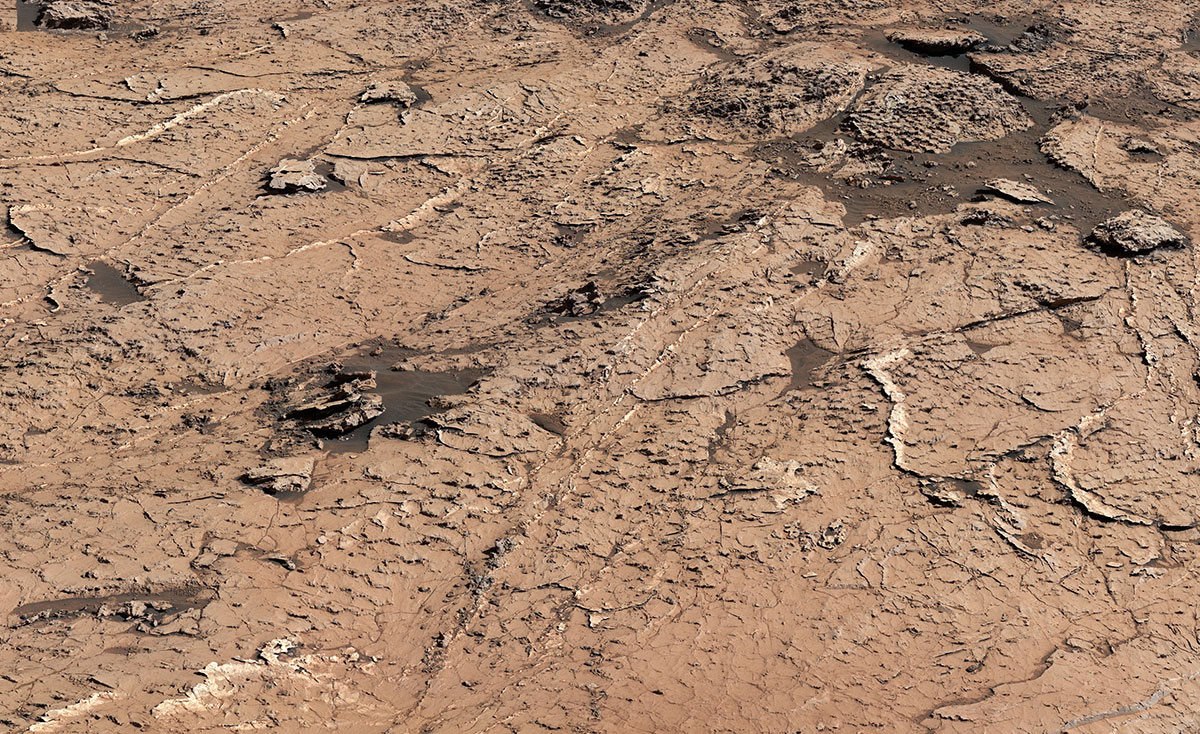
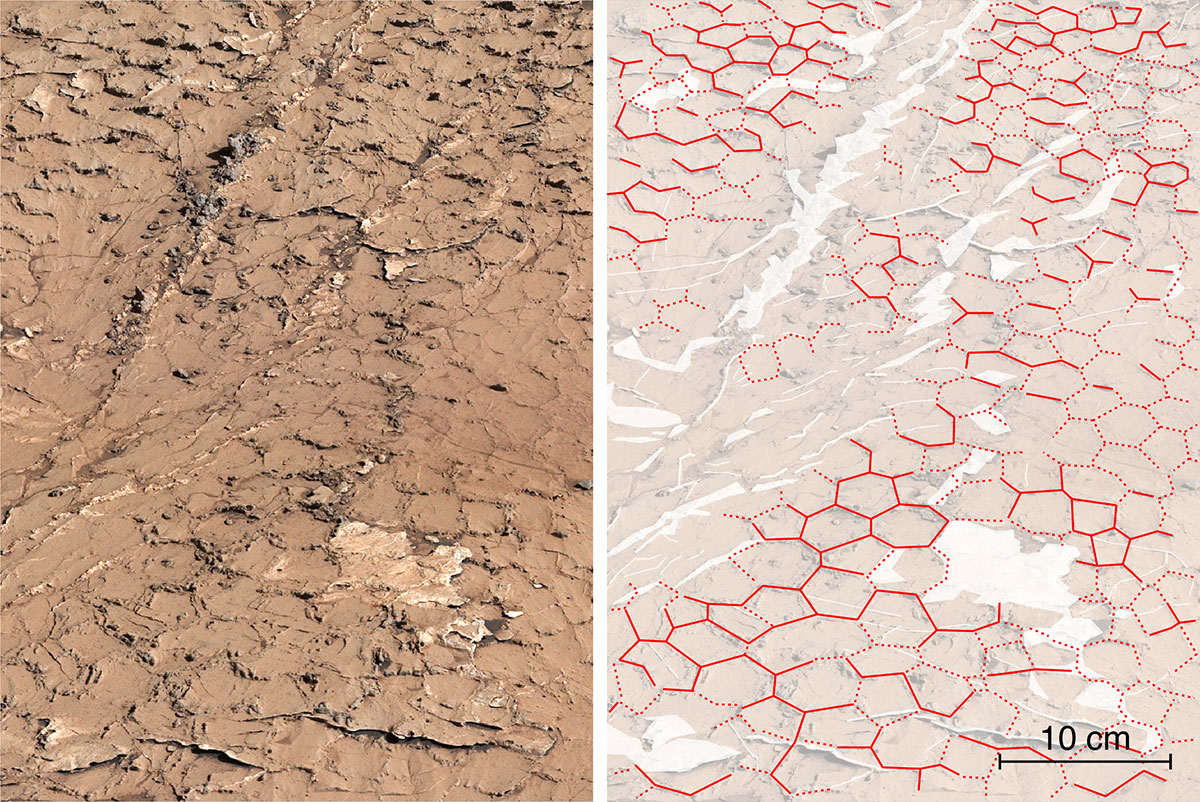
Meritano di essere riportati qui alcuni dettagli su un paper pubblicato sulla rivista Nature il 9 agosto con prime firme di Rapin, Dromart e Clark. In esso viene analizzato un curioso pattern esagonale che Curiosity ha osservato nel giugno del 2021 in una cosiddetta regione di transizione argilla-solfato che è stata denominata “Pontours”.
Ci troviamo di fronte a delle crepe preservate nell’antico fango che gli scienziati ritengono si siano formate in seguito a lunghi cicli di ambienti umidi e secchi che si sono alternati nel corso del tempo. Questo tipo di spaccature assume dapprima una forma a T i cui angoli, con successive reidratazioni, vengono smussati e addolciti sino a raggiungere la forma a Y attualmente visibile.
La possibilità che Marte, come la Terra, in passato abbia attraversato dei cicli stagionali di clima umido e secco, è elettrizzante per gli scienziati. Si ritiene infatti che questa alternanza sia utile, o forse persino indispensabile, alla creazione delle molecole biologiche complesse (si parla di polimerizzazione prebiotica) che definiamo i “mattoni della vita”, i quali avrebbero poi permesso la formazione di vita microbica.
Mentre 11 anni di osservazioni di Curiosity stanno confermando l’esistenza di un ambiente che avrebbe potenzialmente potuto sostenere la vita, questa nuova ricerca potrebbe aver individuato le prove di un ambiente che ne potesse addirittura favorire l’origine in un’epoca tra 3.6 e 3.8 miliardi di anni fa, in un’era geologica nota come transizione Noachiana-Esperiana. Per maggiori dettagli vi rimando all’articolo completo e di libero accesso disponibile a questo link https://www.nature.com/articles/s41586-023-06220-3
Anche per questo aggiornamento da Marte è tutto, alla prossima!








