

In queste ore si stanno susseguendo in rete varie notizie sullo stato di Ingenuity, il drone marziano in forza alla NASA nell’ambito della missione Mars 2020. Visto il rischio di ricevere informazioni parziali o contradditorie, con la Redazione abbiamo sentito la necessità di fare chiarezza sull’argomento.
Come raccontato in News da Marte #24, il 6 gennaio Ingenuity ha eseguito ma interrotto anzitempo il suo 71esimo volo. La causa del problema, che ha obbligato l’elicottero a quello che potremmo definire un atterraggio di emergenza, sembra sia stata il terreno privo di significative caratteristiche superficiali che a un certo punto del volo ha impedito al software di navigazione di calcolare correttamente direzione e velocità di spostamento.
Le informazioni di telemetria hanno permesso di stimare una traslazione di 71 metri, tuttavia da confermare con un riscontro fotografico per avere la certezza della posizione dell’elicottero. È questa la ragione per cui, a due settimane e mezzo dal volo, la mappa ufficiale non ha ancora ricevuto un aggiornamento.


A questo scopo, come avvenuto in passato in occasione di un simile inconveniente, i tecnici del Jet Propulsion Laboratory hanno programmato una breve attività aerea della durata di 32 secondi con lo scopo di osservare il suolo da 12 metri di altezza. Questo volo, il 72esimo di Ingenuity, è avvenuto il 18 gennaio.
Il giorno seguente le pagine della missione NASA hanno descritto un problema di comunicazione tra Ingenuity e Perseverance nelle fasi conclusive dell’atterraggio.
Il flusso dei dati inviati dall’elicottero al rover (che svolge sempre la funzione di ponte radio per il drone) indicherebbe che il volo è stato eseguito, ma la telemetria trasmessa in tempo reale si interrompe bruscamente durante gli ultimi secondi in corrispondenza dell’atterraggio.
Non vi tengo sulle spine e vi rassicuro subito sul lieto fine di questa cronaca: il 19 gennaio un tentativo di riprendere contatto con l’elicottero ha dato conferma del suo buono stato di salute. Ingenuity è atterrato correttamente, si trova in posizione verticale e le sue batterie sono cariche.
In attesa che la NASA scarichi dalla memoria del drone le immagini della camera di navigazione, definendo così con precisione la posizione dell’ultimo airfield, possiamo ricorrere alla posizione stimata e ai dati altimetrici della regione.
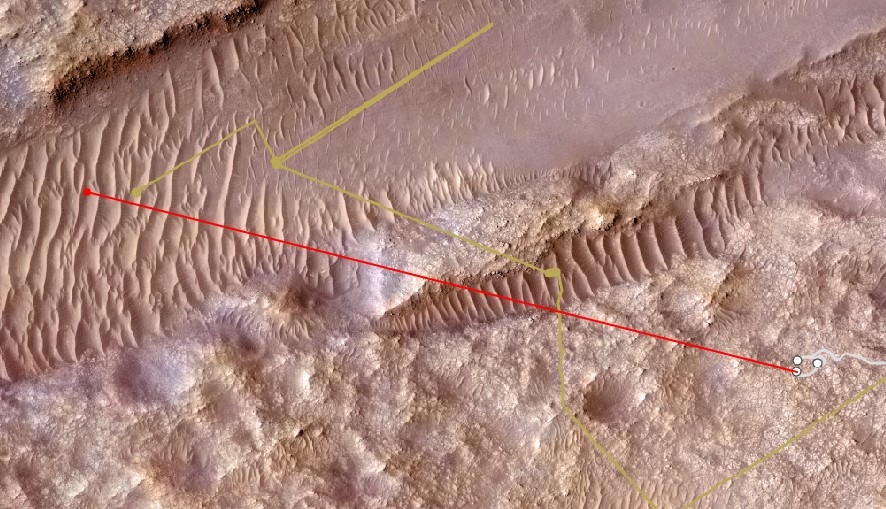
Scopriamo così la presenza di un’alta cresta rocciosa che ostacola la line of sight tra i due apparati, complicando ulteriormente le comunicazioni già rese problematiche dalla distanza di oltre un km tra i due.
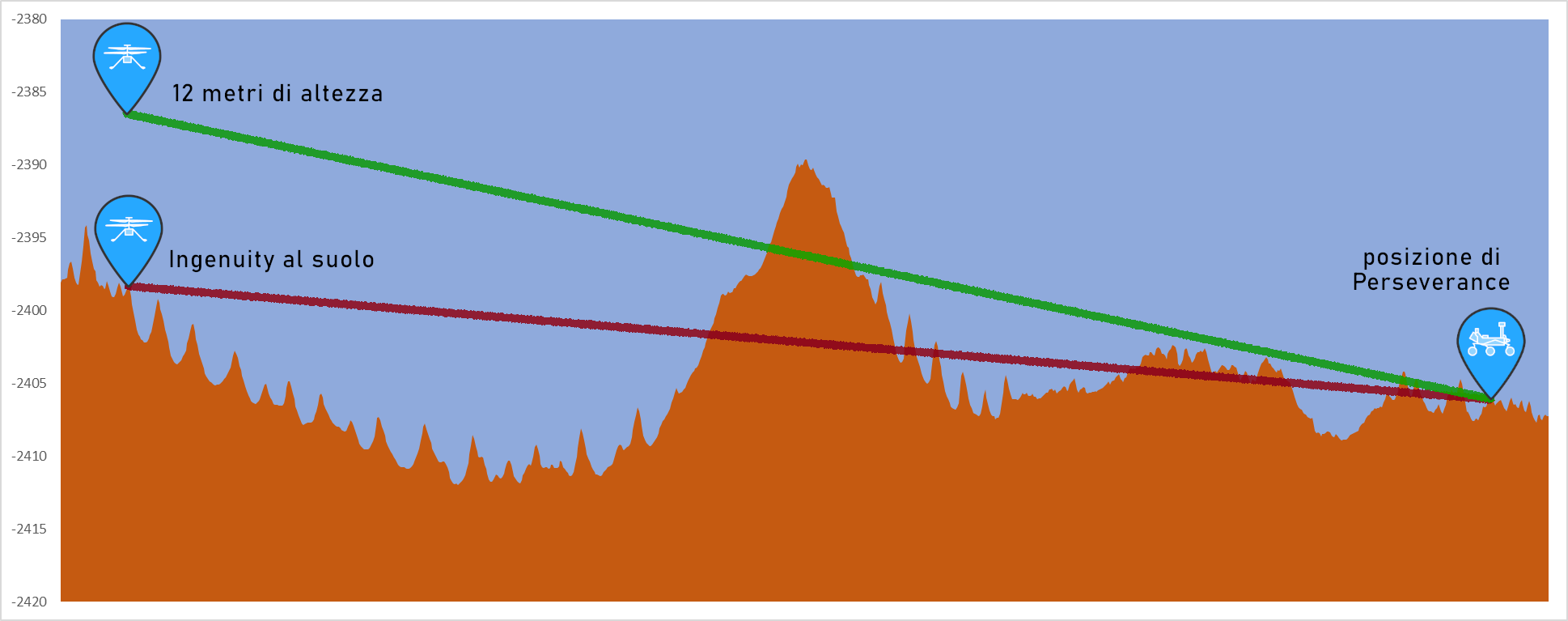
Non è quindi difficile immaginare ciò che potrebbe essere avvenuto nel corso del volo 72.
In fase di ascesa e alla quota di 12 metri il segnale radio di Ingenuity riusciva ad aggirare il grosso ostacolo roccioso, che però ha offerto un oscuramento sempre maggiore man mano che l’elicottero ha ridotto la sua quota in fase di atterraggio.
Restiamo in attesa di ulteriori e più dettagliati aggiornamenti da parte della NASA e del JPL, che troveranno ampio spazio sulle pagine virtuali e fisiche di Coelum Astronomia.
Fonte dei dati altimetrici (DTM): https://refubium.fu-berlin.de/handle/fub188/41095







